

Желите да се посвађате између паукова робота? Затим пажљиво проучите овај чланак, у њему ће вам Учитељ рећи како направити таквог паука. А ради јасноће његовог рада, погледајмо видео.
Алати и материјали:
За паука
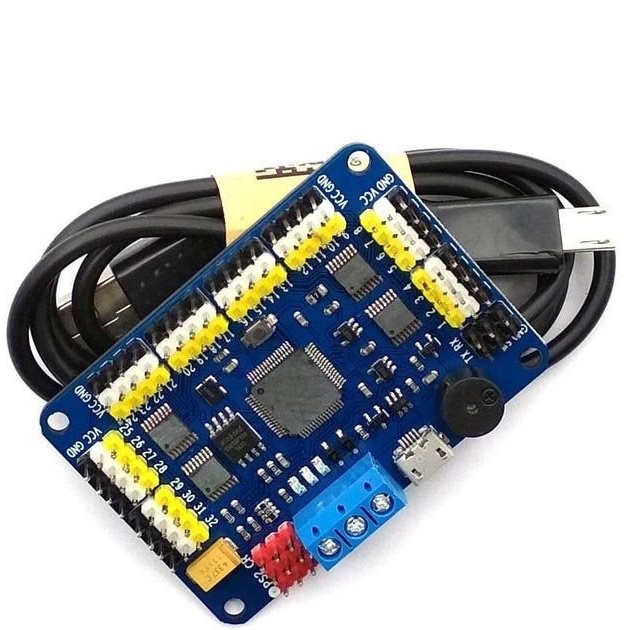
32-канални серво контролер;
-Вемос Д1 Мини контролер;
- Серво погони МГ90С - 18 ком;
-Убец 6А 5В регулатор;
- претварач ДЦ-ДЦ;
- скакачи;
-Баттерија;
За торањ
-Два мотора;
-Повер модул;
- Спуштање претварача;
Серво;
-3Д штампач;
-Поље за лепљење;
-Ллуе;
- одвијач;
-Причвршћивачи;
- двострана трака;
-Ниппер;
-Ниж;
-Надфилес;
-Пластичне куглице;
-Прибор за лемљење;






Први корак: Штампање делова
Прво морате на 3Д штампачу одштампати детаље о телу и ногама. На овом можете преузети датотеке за штампање линк.


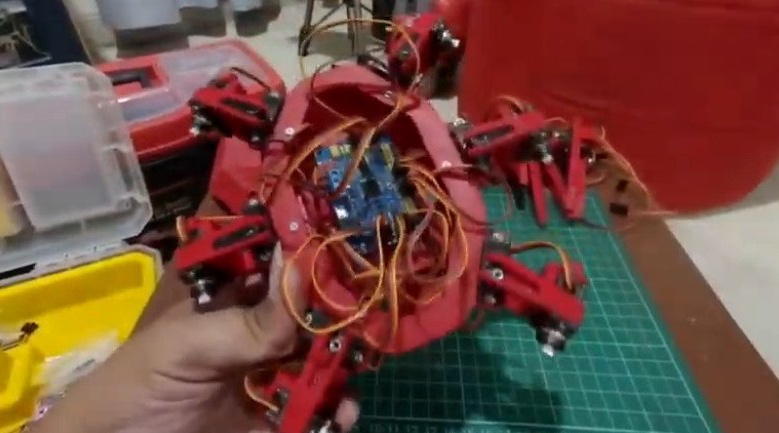
Корак други: Направите
Сада треба да сакупите робопаук.
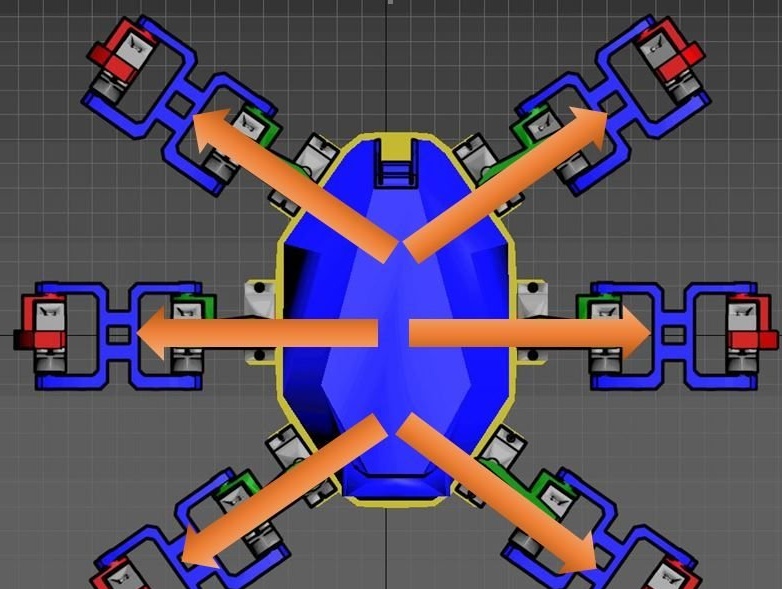
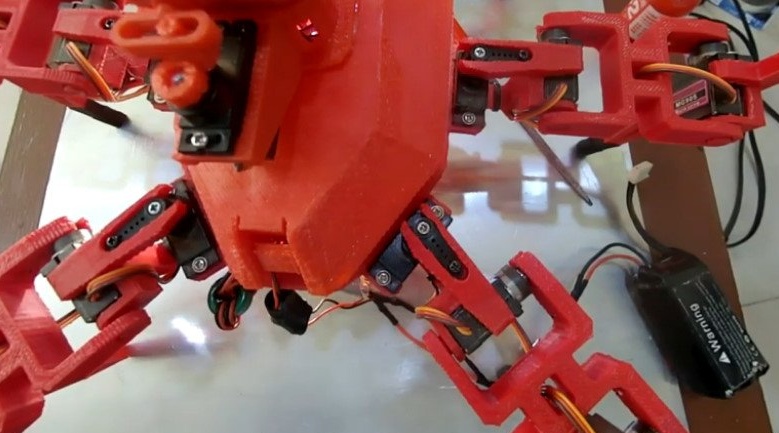
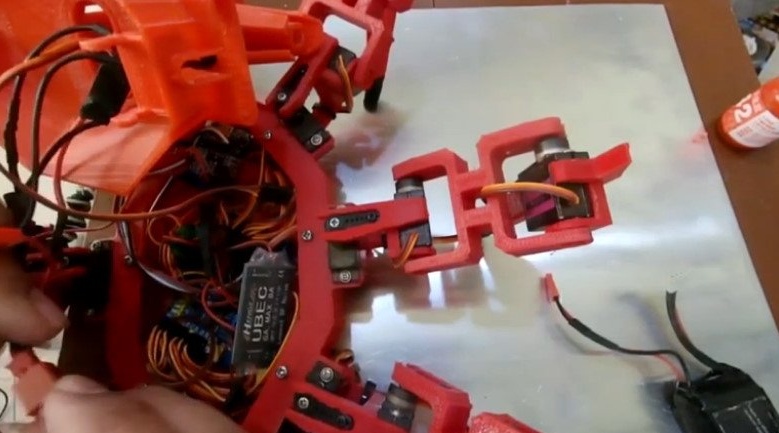
Мајстор инсталира серво на зглобове паукове ноге. Укупно, робот има шест ногу и три сервоуса на свакој нози.








Инсталира серво уређаје на платформу шасије.




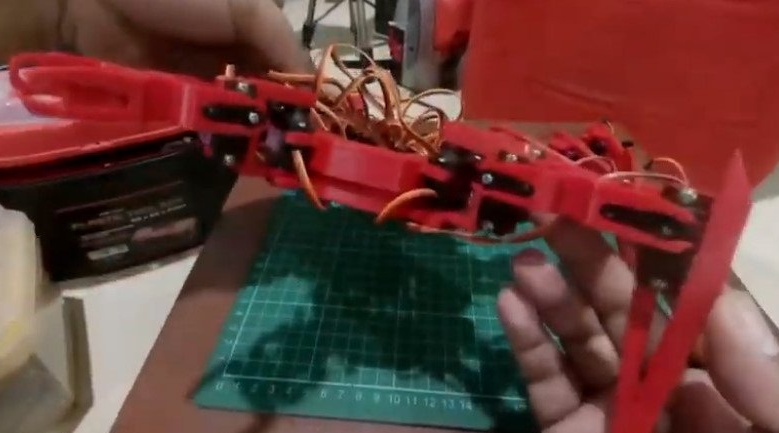
Причвршћује прве зглобове ногу на серво платформе.




Жице су увучене у технолошке рупе и повезане са контролером.





Инсталира штитнике.


Успоставља друге зглобове ногу. Повезује жице са серво-уређаја на регулатор.






Инсталира трећи спој. Овим зглобом паук ће се наслонити на површину током померања.



Повезује и проверава рад сваког серво погона.



Ако све нормално фиксира жице кравате, инсталира батерију и затвара поклопац.



Процес израде можете видети у видеу.
Трећи корак: Отприлике електроника
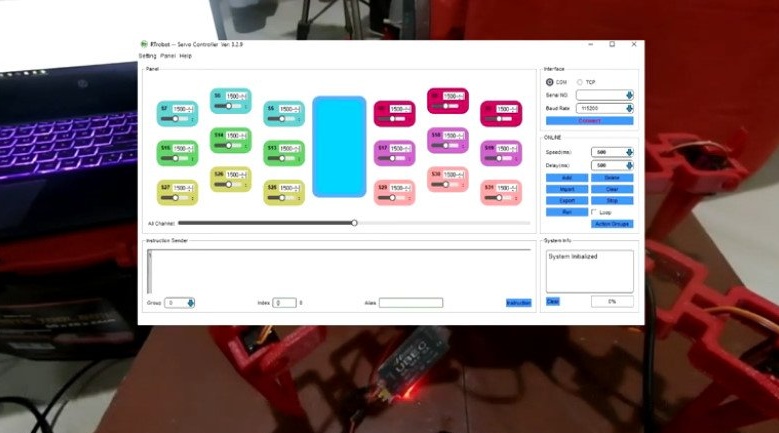
Чаробњак је користио РТробот серво контролер за контролу покрета. Програм за управљање може се преузети овде или овде.
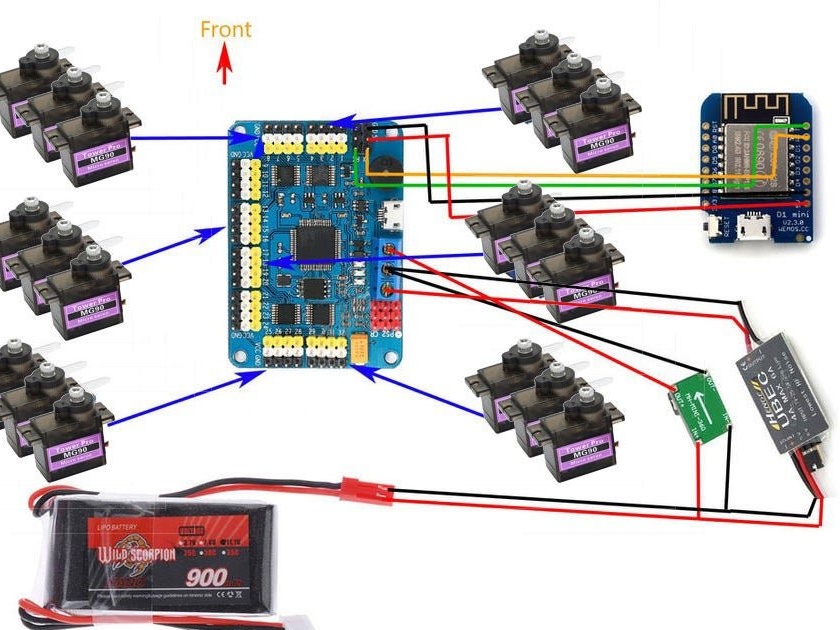
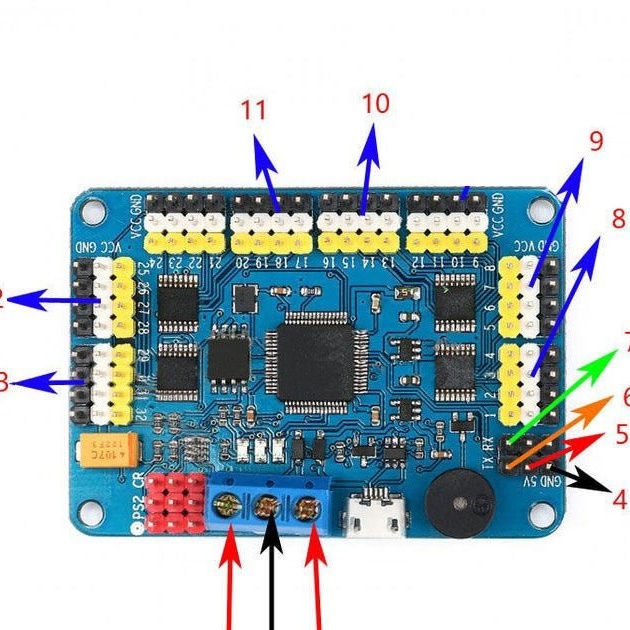
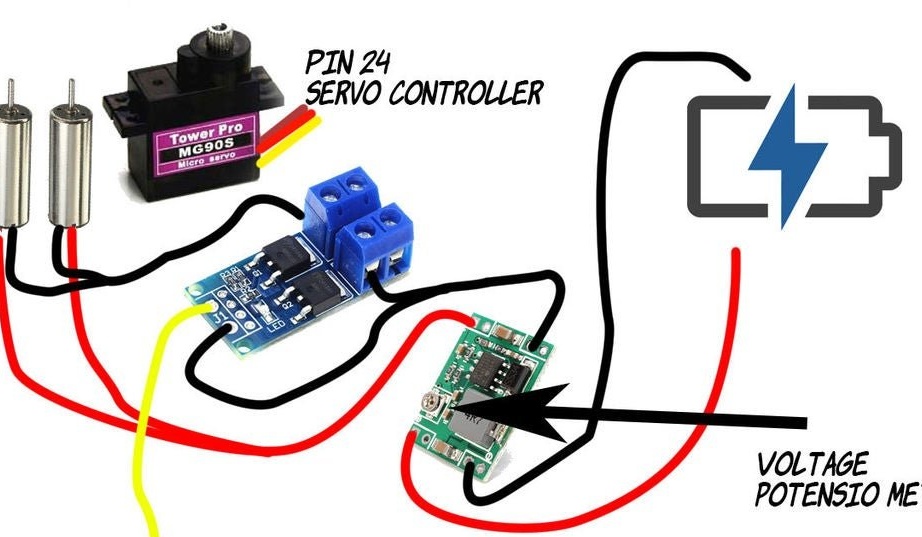
Све је повезано на следећи начин:
1. 5В (+) УБЕЦ излаз
2. Земља са УБЕЦ-а и претварач за буцк
3. Напајање од 5 В (+) из претварача
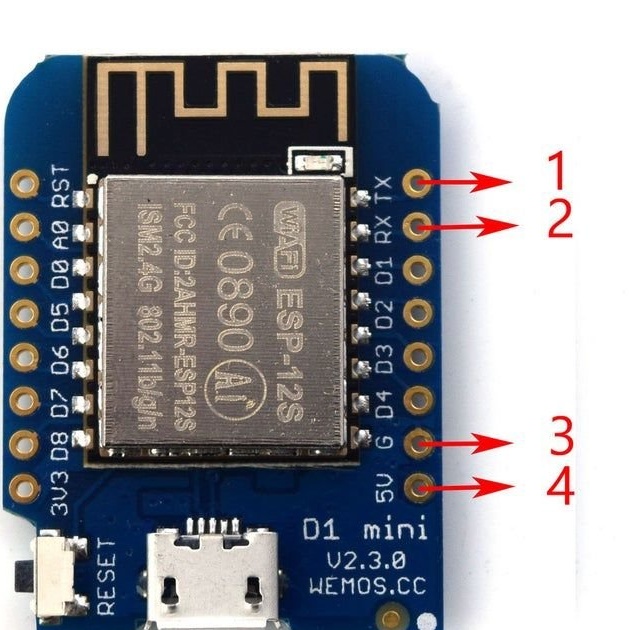
4. на мини Г пин Вемос Д1
5. на Вемос 5в
6. на Вемос Д1 РКС
7. Вемос ТКС
Серво погони су повезани на иглице од 8 до 13.
Инсталирајте код на НодеМЦУ. Можете је преузети овде.
ВеМос Д1 мини је минимална ЕСП8266 Ви-Фи картица.
Користећи вемос Д1 мини као ВИФИ приступну тачку, можете послати серијску наредбу на серво контролер. Све што је потребно је само да бљеснете нодеМЦУ плочу с кодом, а паметни телефон можете повезати са нодеМЦУ АП. Затим помоћу веб прегледача идите на хттп://192.168.4.1.
Важно је.
када укључите серво, сви серво-мотори ће се пребацити у првобитни / стандардни положај
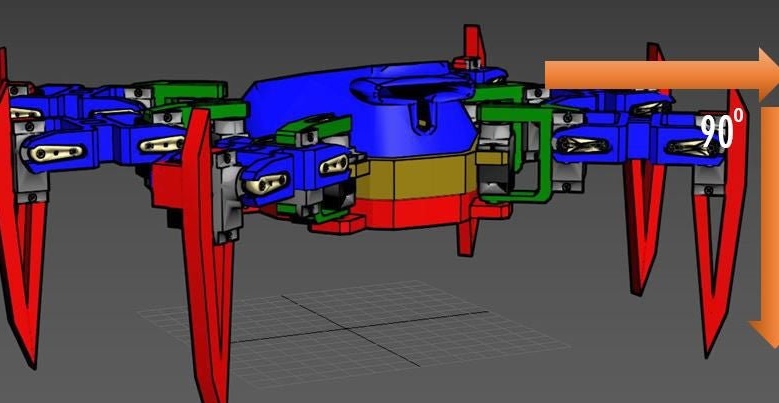
инсталирајте серво уређаје што је тачније могуће, као што је приказано на слици изнад или у видеу
подесите положај зглобова, искључите и поново укључите уређај да бисте били сигурни да су све ноге у исправном положају
ако се зглобови стежу, трљајте, прилагодите положај.
Корак четврти: Кула
Сада се окрећемо монтажи куле.
Прво, детаљи куле морају бити одштампани. Можете преузети датотеке са овог линк.
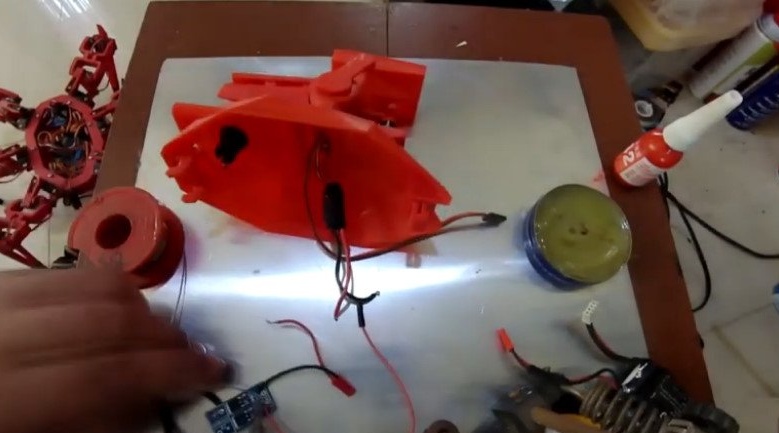
Тада мајстор крене да састави торањ. Доље је склоп за окретање куле и спајање електричних дијелова.
Инсталира серво на торањ.







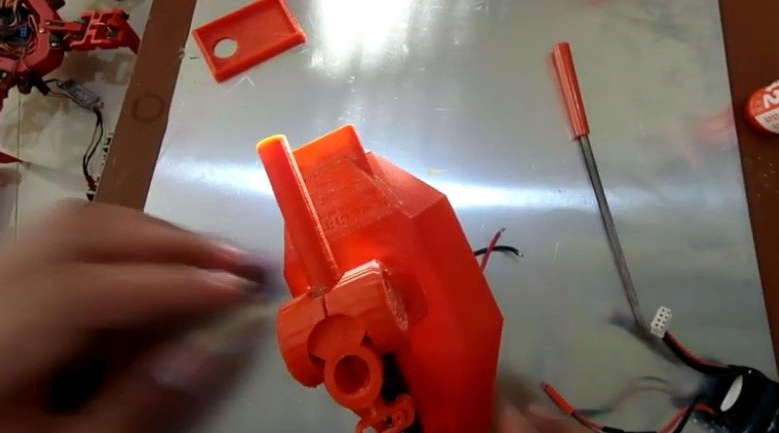
Двострана трака се залепи за ваљке.


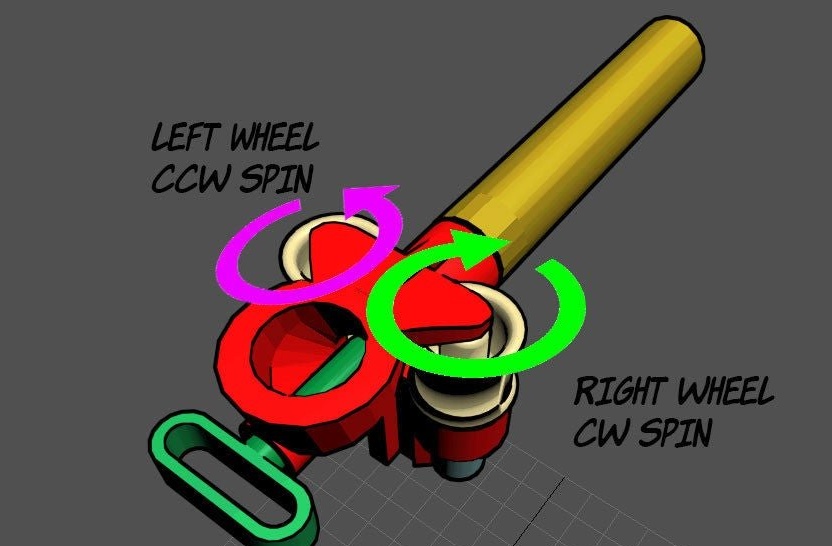
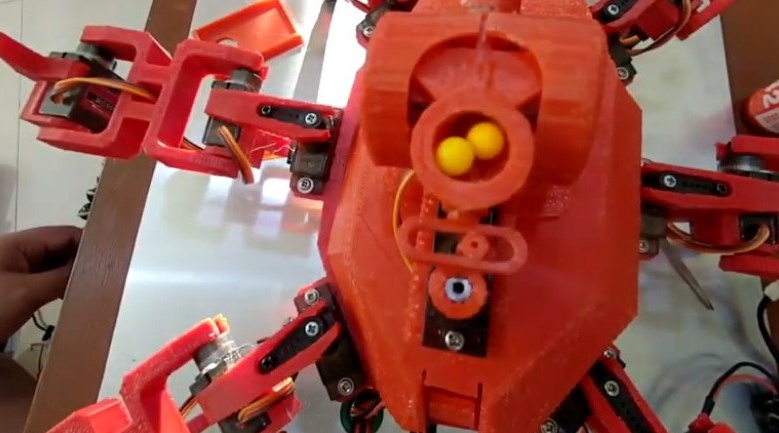
Скупља пиштољ. Инсталира моторе у држач. Инсталира ваљке на осовине мотора.







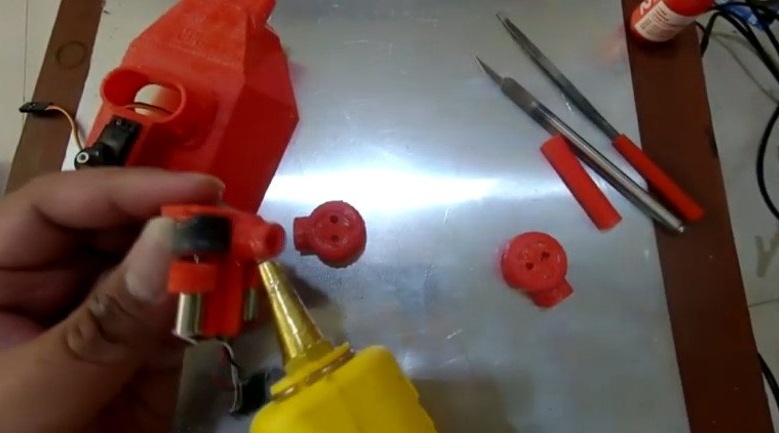
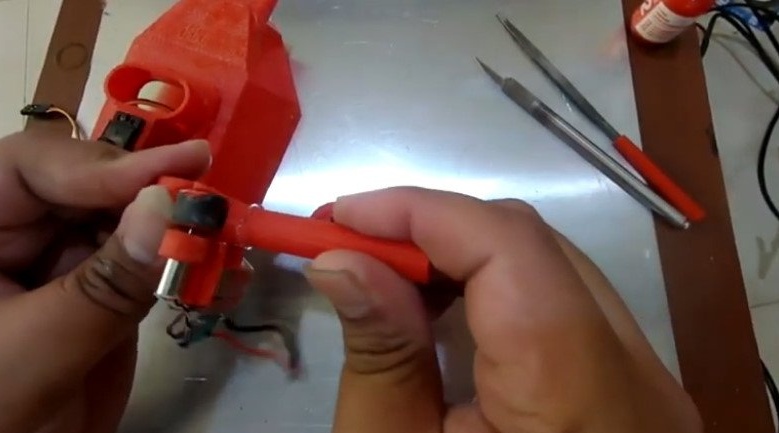

Повезује жице и сакупља торањ.




Учитава гранате и проверава рад пиштоља. Механизам се може подесити померањем држача на серво вратило.


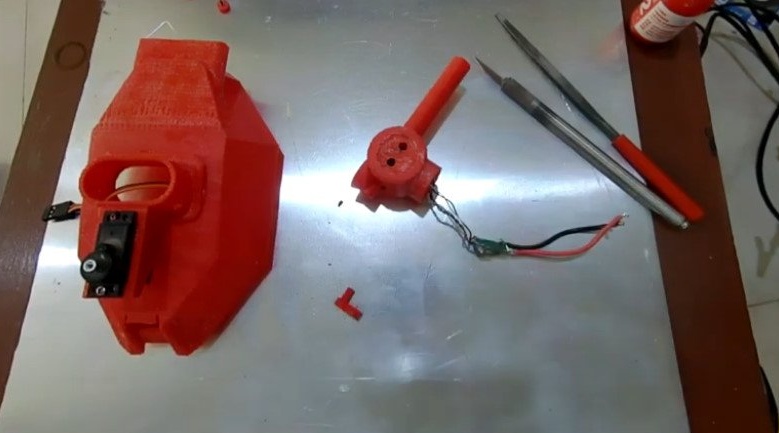
Изводи завршно спајање, монтажу и инспекцију.




Видео са монтажом куле можете видети доле.
Све је спремно. Набавите још један такав робопаук и можете договорити свађе.
