

Аутор је пројект засновао на једноставнијој верзији. домаће бродове и усавршили је. Сензори се постављају у чамац како би се избегле препреке и прешло у светлост. Како се користи контролер у чамцу Ардуино, ултразвучни сензор је постављен напред, а светлосни сензори су смештени са стране. Овај једноставан чамац не сруши се у зидове, а управља се батеријском лампом.
Материјали и алати:
- Изолациона трака / лепљива трака
- Термолепак са врућим лепком
- ДЦ мотори 2 ком
- Пластичне боце 2 ком
- жице
- Мали пропелери 2 ком
- Ардуино, компјутерски и УСБ кабл
- Пластична кутија
- 9В батерија и конектор
- Повер диоде (тип 1Н4004)
- Отпорници
- Транзистор МОСФЕТ или ТИП 120
- Две фотоћелије и два дугмета
- маказе
- лемљење лемилицом

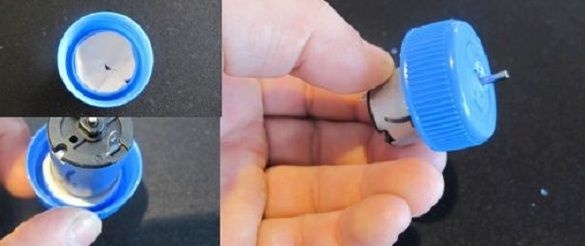
Корак 1. Инсталирање мотора.
Поклопац се вади из боца и у свакој се прави рупа. Унутар корице аутор утисне вруће љепило без затварања рупа. Поставио је осовину мотора у рупу и ставио је на лепак. Након што се лепило осуши, осовина се слободно ротира. Исти поступак се дешава и са другим прекривачем.
Корак 2. Причвршћивање боца.
Боце су биле причвршћене заједно помоћу принципа сплава уз помоћ три траке лепљиве траке.

Корак 3. Лемљење мотора.
Будући да мотори монтирани на утикаче нису имали жице, било их је потребно лемљење, дужина жица је била око 25-30 цм.

Корак 4. Рез у боцама.
Да би жице пале у труп брода, направљен је мали утор са њихове горње стране.

Корак 5. Осигуравање мотора.
Надаље, аутор изврће поклопце на боцама, јер се нису добро увијале, морао сам користити вруће љепило. Жице се гурају кроз припремљене рупе на боцама.

Корак 6. Случај.
Пластична кутија се залепи за две боце. У овом капацитету за електронику можете направити рупе за жице или држати жице кроз стражњу страну кутије. Рупе на жицама на боцама су изолиране врућим љепилом.

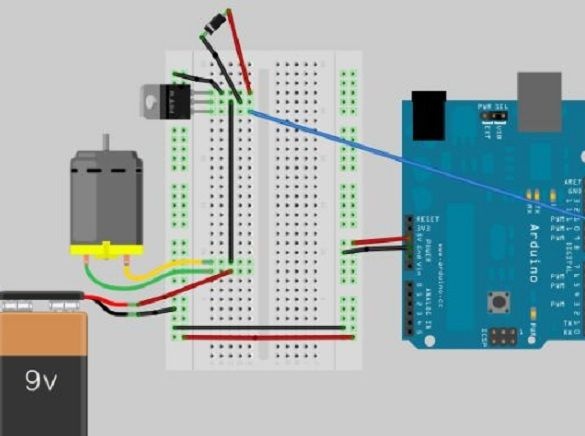
Корак 7. Дијаграм ожичења
Круг користи ТИП 120 транзистор као прекидач (можете користити сличне МОСФЕТ или Дарлингтон транзисторе). Користи се за пребацивање оптерећења када се троши велика количина струје, јер Ардуино нема довољно снаге за моторе. Овај круг се саставља за први, а затим за други мотор (други мотор није потребан за други мотор).
Корак 8. Сензори.
Ултразвучни сензор је одличан за предњи део чамца, упозорава на препреке на путу. Фотоцелице се понашају попут антена и користе се за пливање брода у светлост.Дугме са стране се користе као сензори препрека. Такође можете да модификујете код и користите друге сензоре, као што је инфрацрвени.

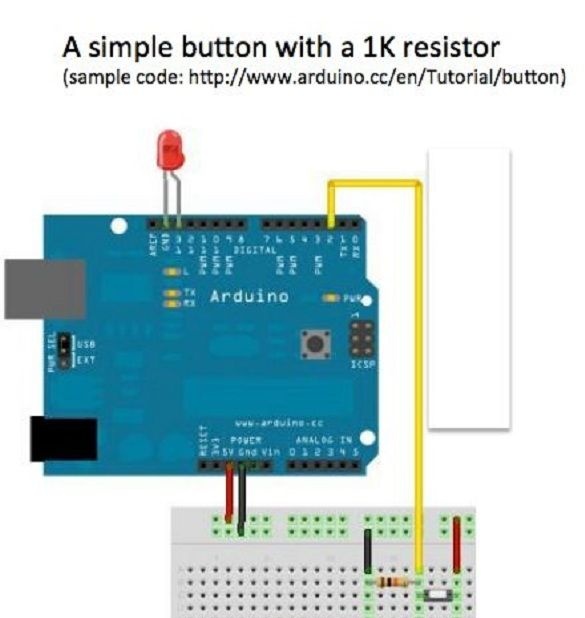
Корак 9. Шеме за сензоре.
Дијаграм приказује везу једноставног дугмета и 1К отпорника. Схема за оба дугмета се понавља, тастери су постављени на обе стране брода. Они ће бити одговорни за промену кретања чамца у судару.
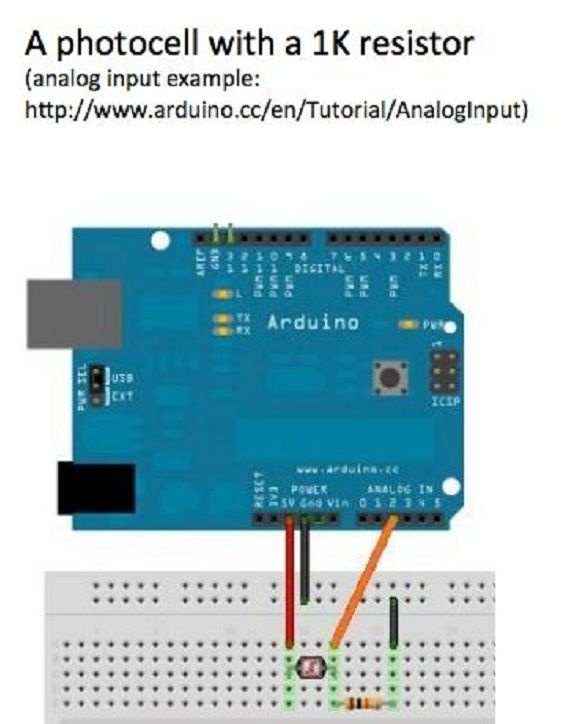
Следећа слика приказује склоп са 1К отпорником и фотоћелијом. Аутор га је извео 2 пута и поставио ћелије на супротне стране брода.
Корак 10. Програмски код.
Аутор је пружио прилику за преузимање свог кода за употребу, пружајући на тај начин основну функционалност онима који ће саставити такав чамац. Код укључује подршку за фото ћелије, даљиномер и дугмад. Чамац ће покушати да избегне препреке испред себе, а окреће се у супротном смеру када наиђе на препреке са стране. Ако не постоји жеља да користите читав низ сензора, само неки од њих имају код за сваки посебно. Можете преузети све кодове испод чланка.
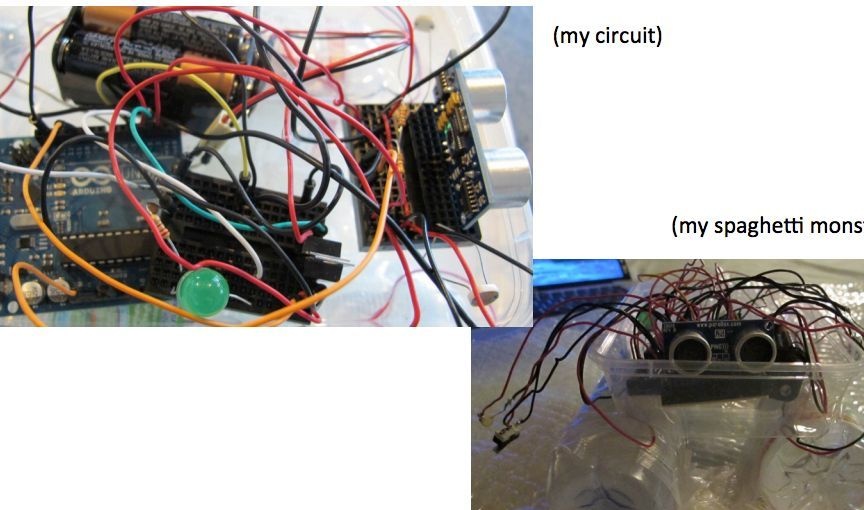
Корак 11. Склапање брода.
Склопљени круг, Ардуино и батерије су у кутији.
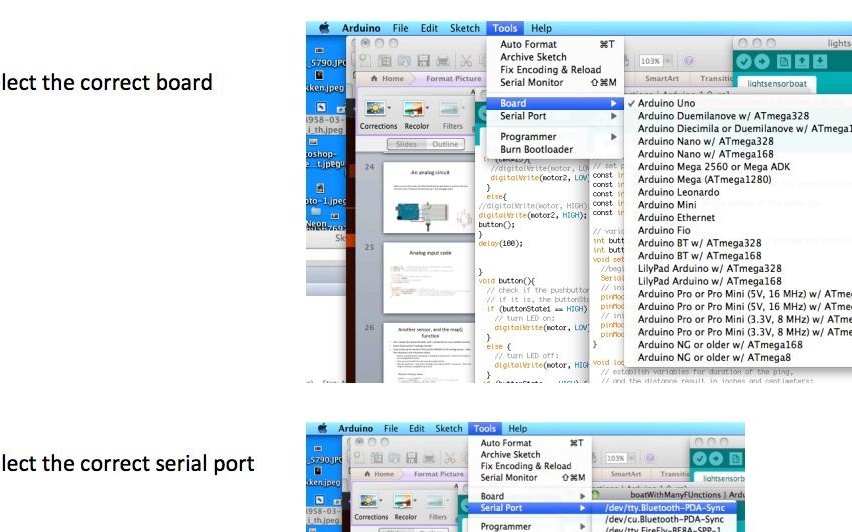
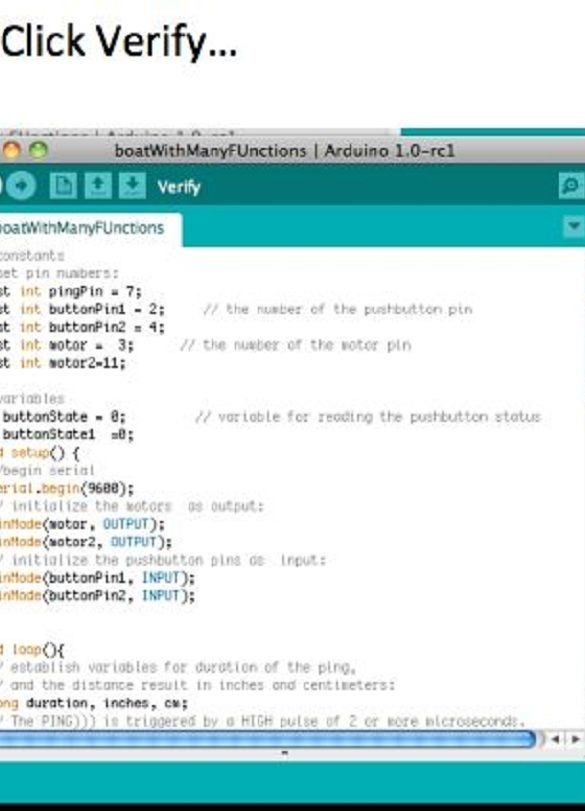
Корак 12. Преузмите скицу.
Затим се отвара Ардуино ИДЕ одабиром праве датотеке и порта, након чега је аутор саставио и послао код у контролер.
Корак 13. Отпоран на воду и тест.
Аутор је додатно изоловао сва потенцијална места уласка воде врућим лепком. Такође је изоловао све жице из кратког споја. Контејнер са Ардуином прекривен је истом кутијом и запечаћен електричном траком. Пропелери су причвршћени на моторе. Овде је брод спреман, сада можете почети са тестирањем на води.



Видео са прелиминарним тестом брода: