

Добар дан љубитељи ардуина! Док је висио на Интернету, наишао сам на прилично забаван чланак о томе како направити руку манипулатором који понавља покрете нечије руке, инспирисан једноставношћу и ефектом домаће домаћи су одлучили да га сакупе. Пронашао сам сензоре савијања на Аллиекспрессу за руку одашиљача и мало се угинуо, једна ствар је стајала око 15-20 долара, испоставило се да ће 5 таквих сензора за само једну руку коштати 75-100 долара, а ово је само за сензоре! Након неког времена научио сам како да направим такве сензоре уради самИспада да је веома једноставно и јефтино.
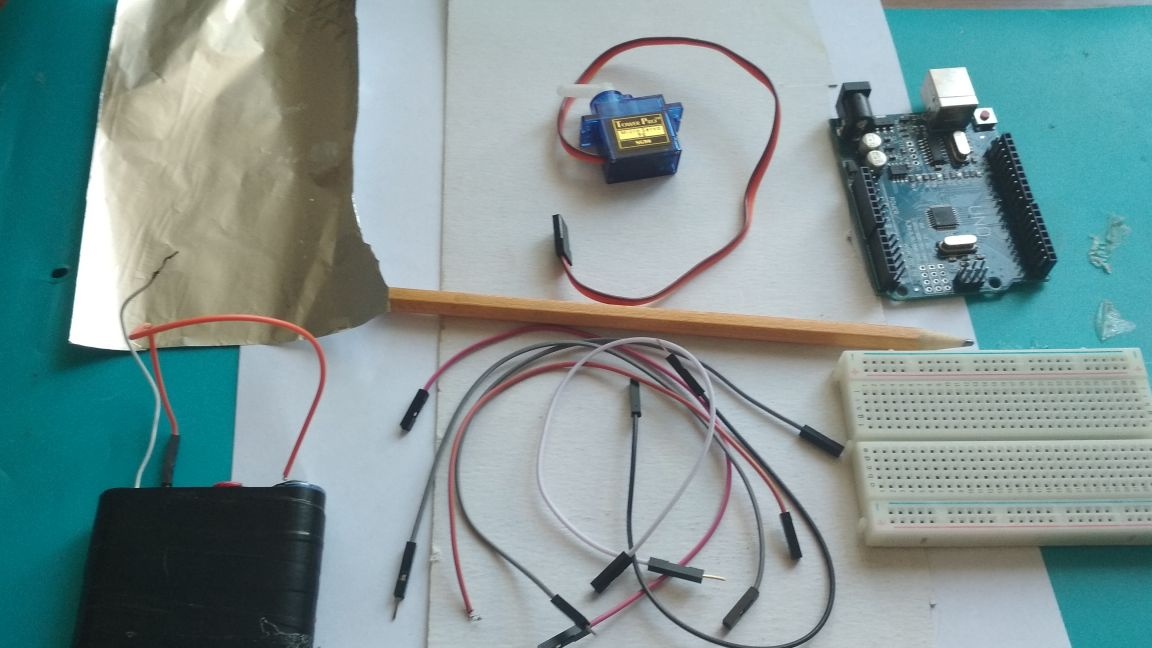
Дакле, за сензор савијања нам је потребно:
плаћање Ардуино Уно ()
-бреадбоард
- повезивање жица попут "отац-мајка" или "отац-отац"
-сервомотор
картон
папир
фолија
оловка
- напајање од 6 до 12 волти (користим 4 батерије спојене у серији на 1,5 В)
Од алата који су нам потребни:
пиштољ за лепљење
маказе
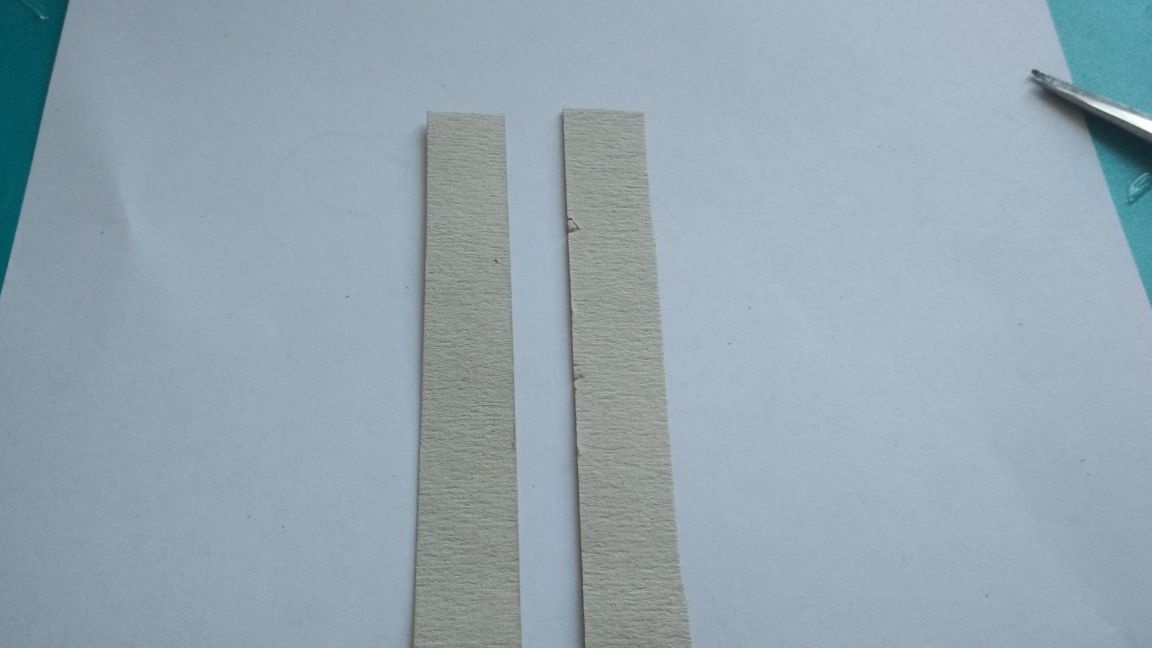
И тако, прво што смо изрезали из картона су две траке 2 цм дуже од кажипрста и ширине око 1 цм:

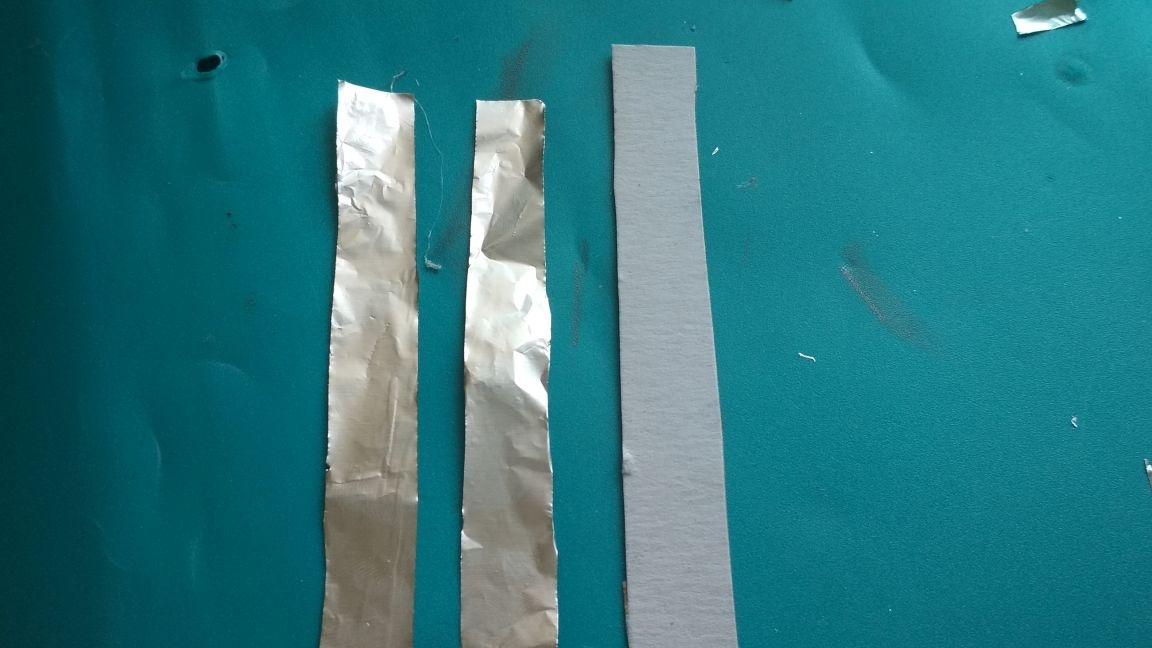
Одрежите једну те исту траку папира само нешто мање:

Оловке осенчите са обе стране папирне траке што је боље могуће:


Изрежите две траке фолије мање од папира:
Лепите их на картонске траке као што је приказано на фотографији:

Из спојних жица „отац-мајка“ одсечемо излаз „мајка“ и чистимо њихове крајеве од изолације:
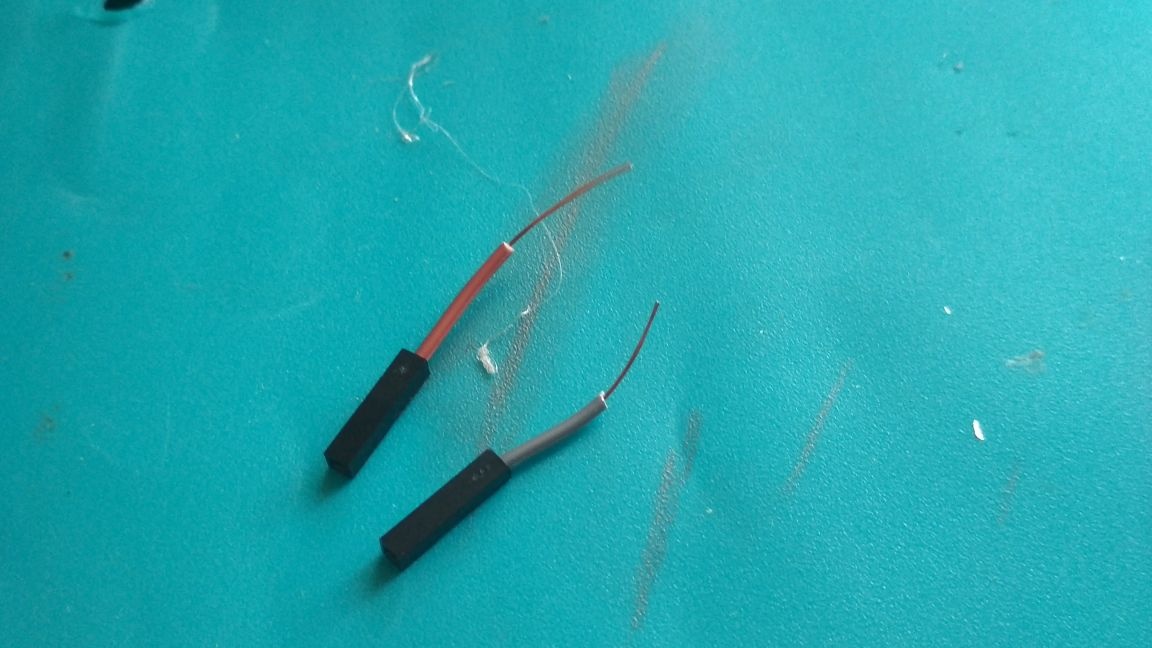
Прилепимо са траке или лемилице:

На једну од половина причврстимо папирну траку, тако да је у додиру са фолијом, а затим другом половином обложите фолијом, притисните и лепите на стране:

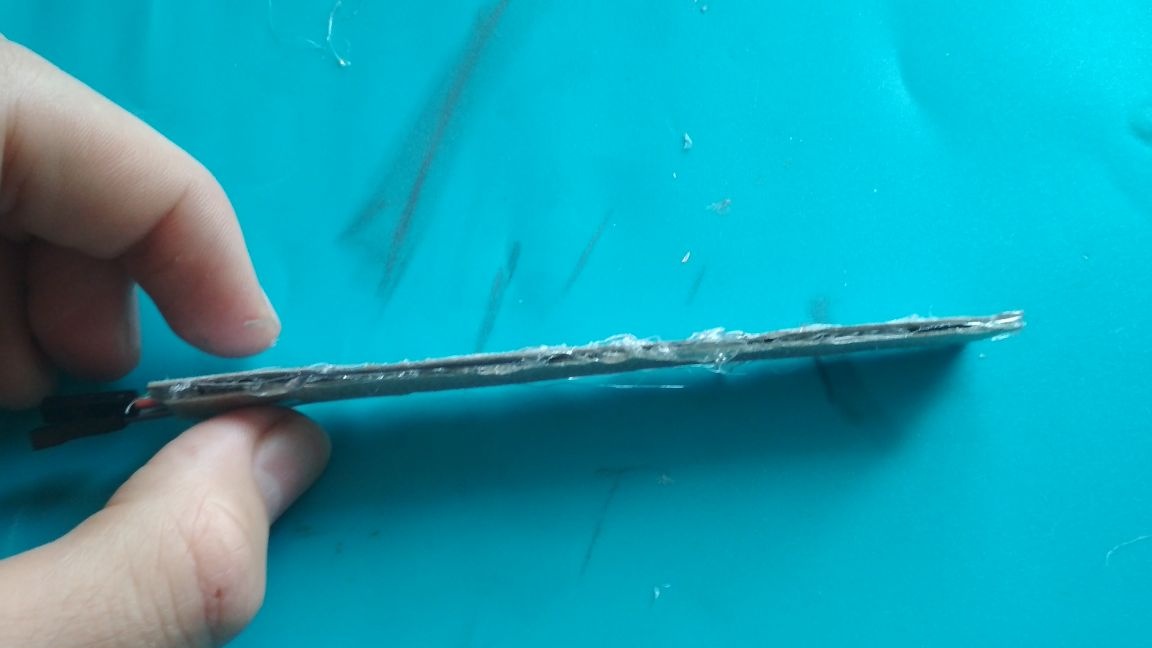

Направимо такве „змије“ са сваке стране уз помоћ врућег лепка, оне су потребне како би дизајн био флексибилнији

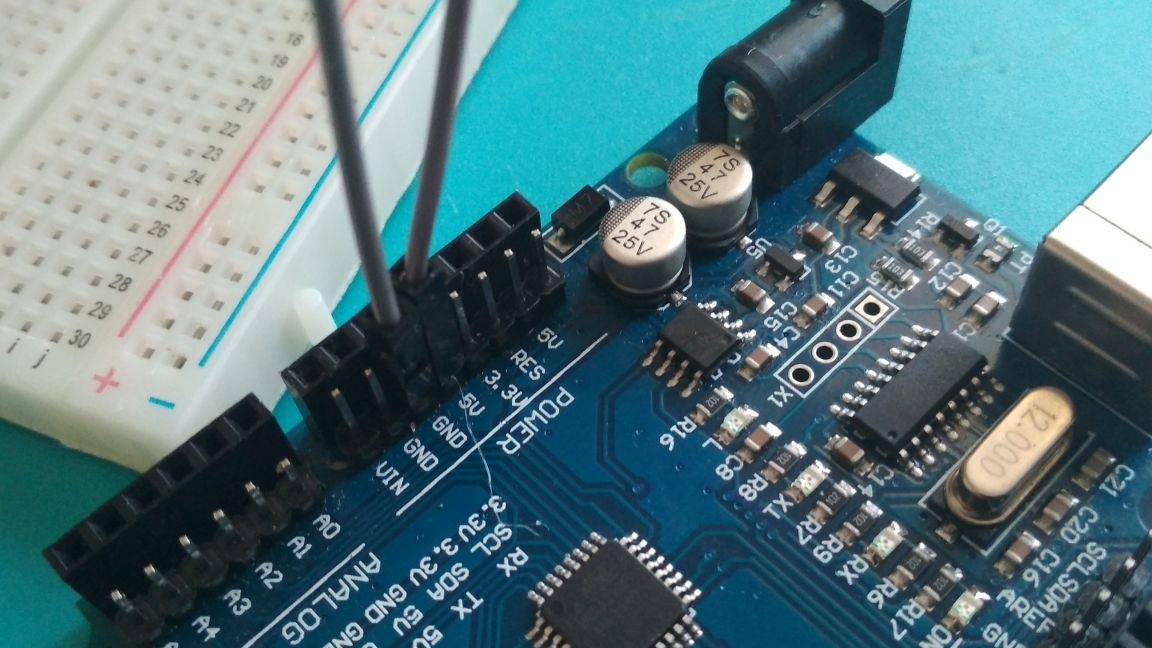
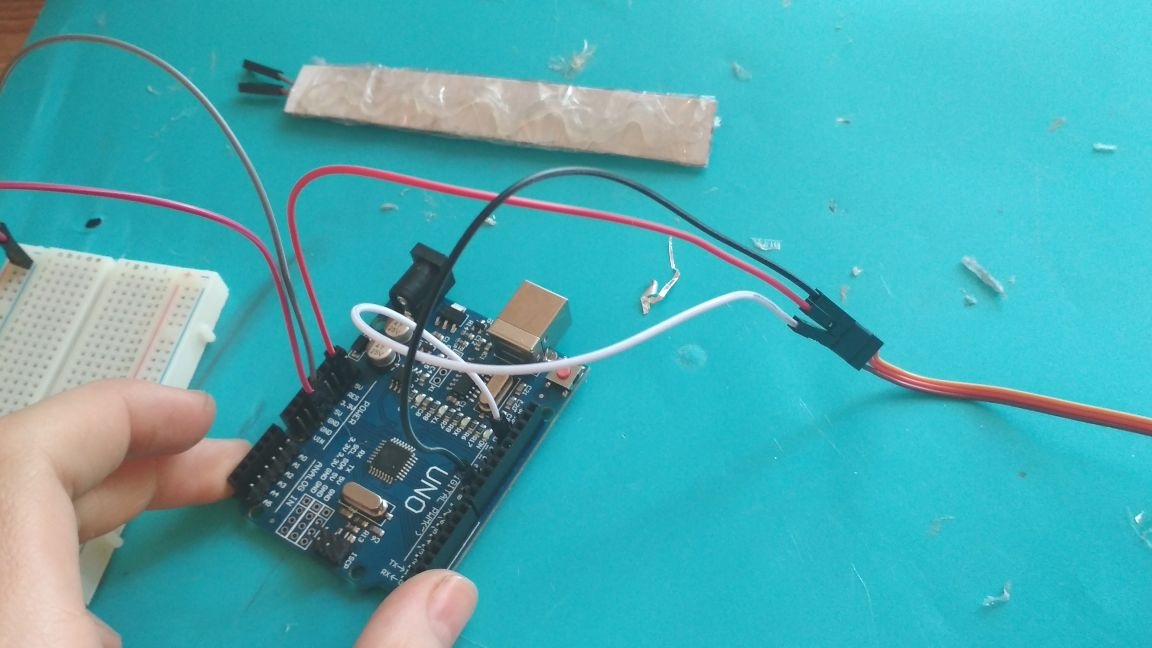
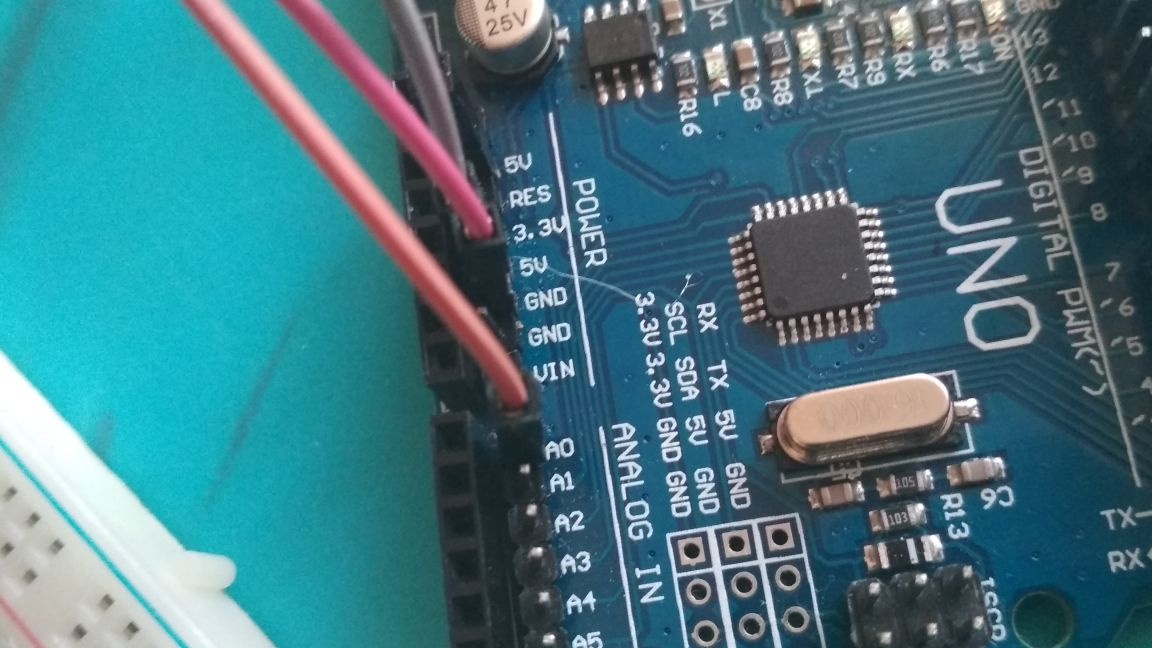
Узмемо ардуино и повежемо излаз од 5 В са плусом плоче, а Гнд на минус:

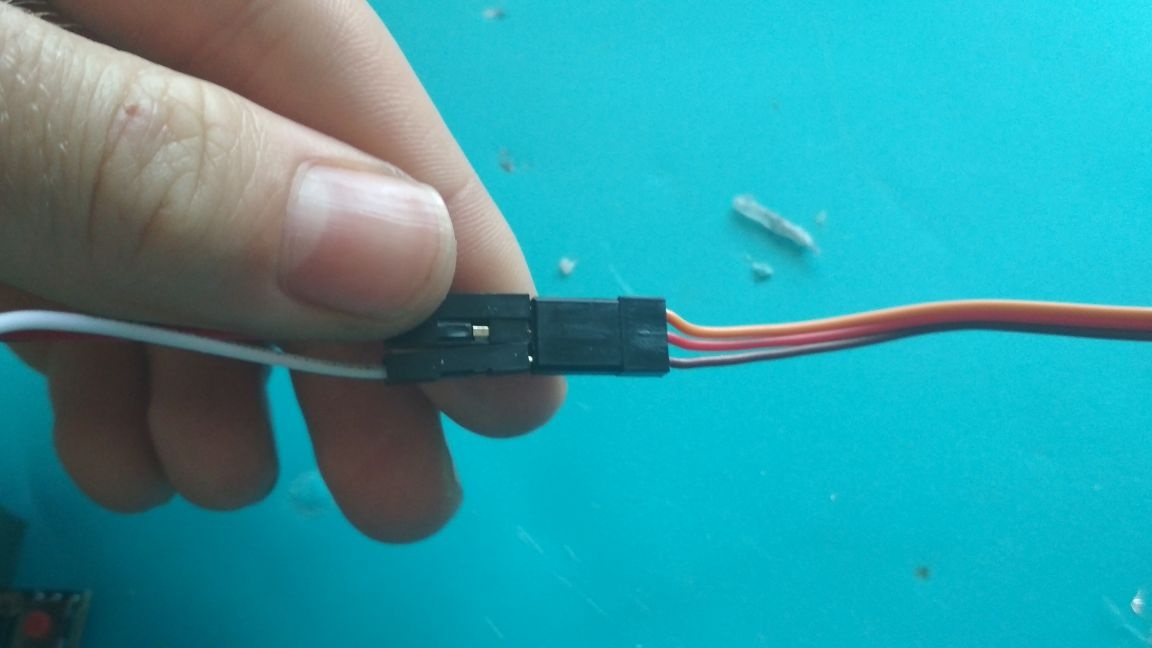
Додајте прикључне жице на сервомотор и повежите их на ардуино на следећи начин:
Смеђа жица до гнд-а
црвена до 5в
наранџаста до 9 пин
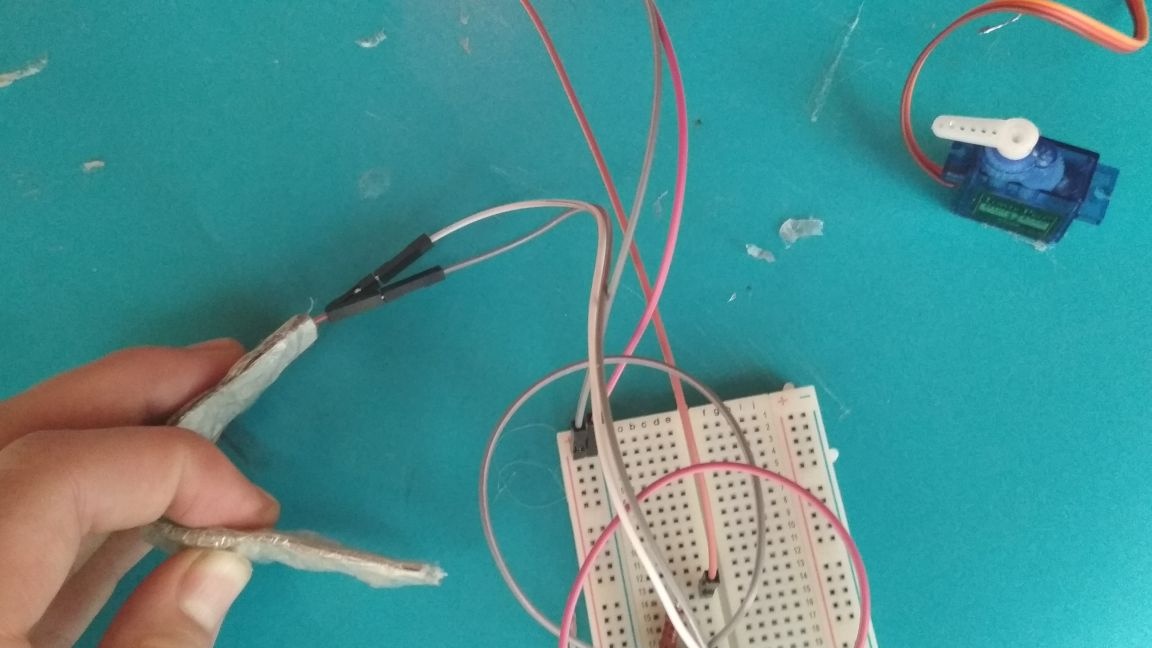
Нашем сензору савијања додајте две тате-тате жице

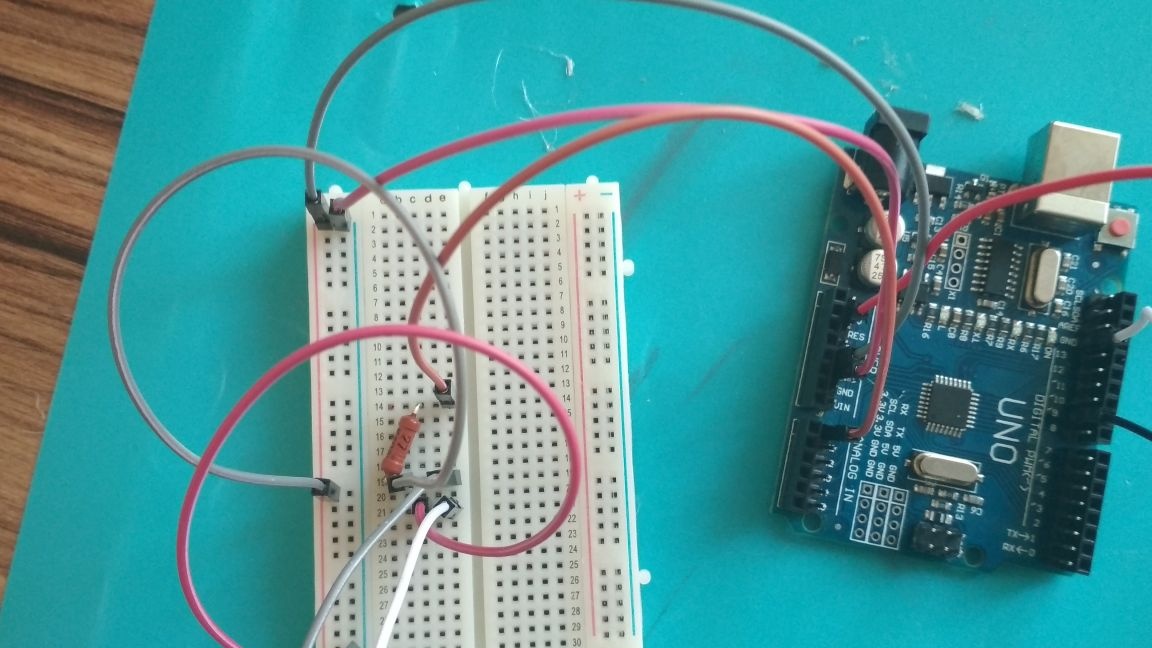
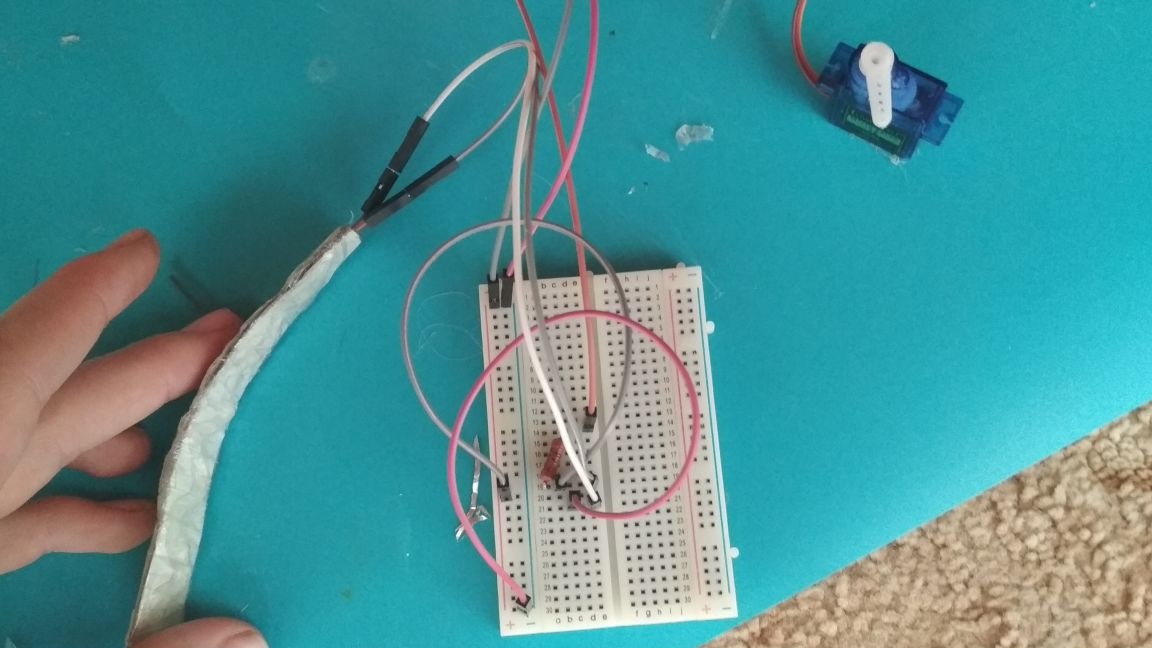
Спојите их на плочу:
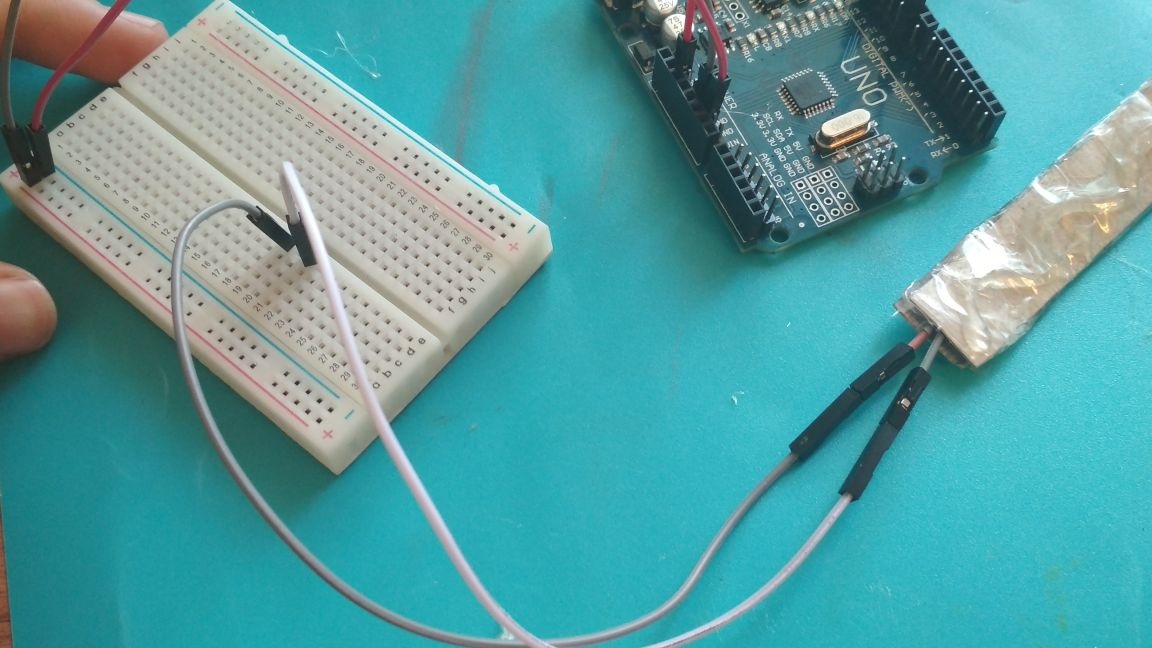
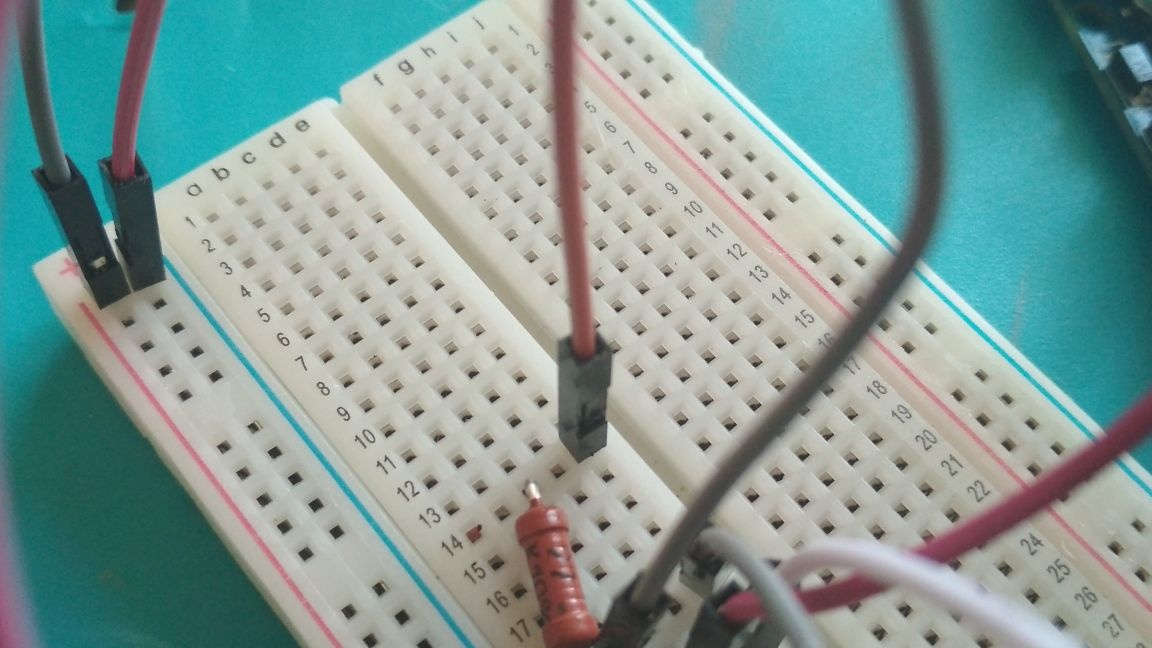
Један од крајева сензора повезан је са плусом плоче кроз отпорник од 22 кило-охма (нажалост, помешао сам га и повезао са другим излазом, али овај није одговорио на радну способност), а други на минус:
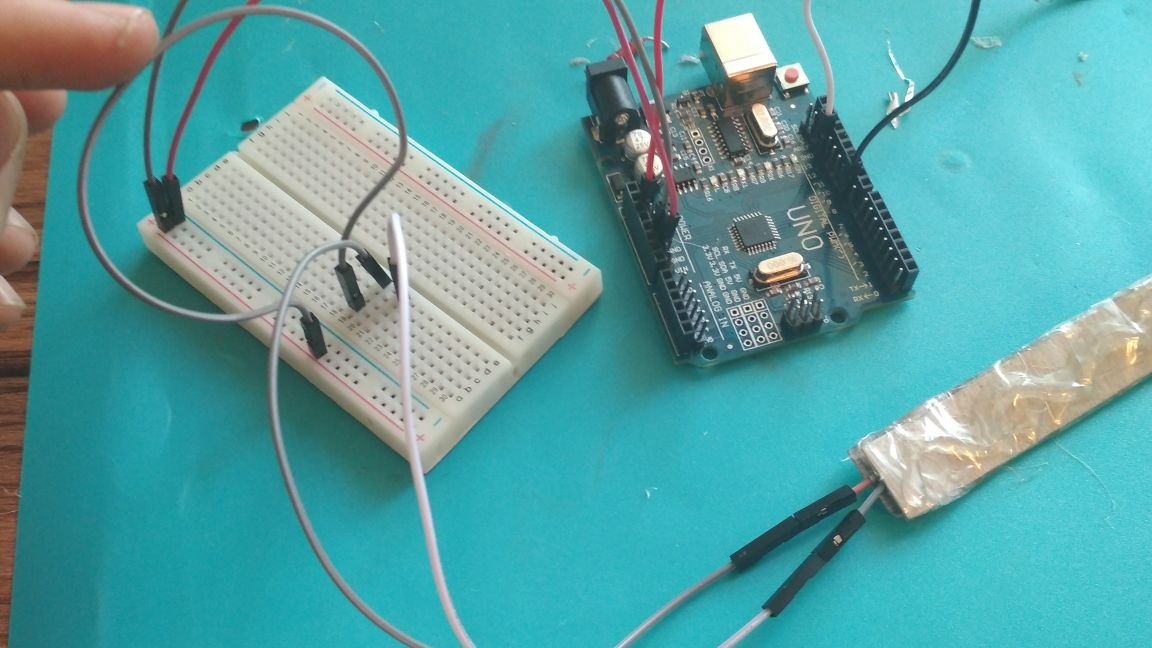
На ону линију са хлебом на којој се налази крај сензора спојеног на плус, додајте још једну жицу и изнесите је на излаз А0 на Ардуино:
Сада повежемо Ардуино са рачунаром, покрећемо Ардуино ИДЕ и у њега убацимо следећу скицу:
#инцлуде
Серво серво1;
цонст инт флекпин = 0;
подешавање празнине ()
{
Сериал.бегин (9600);
серво1.аттацх (9);
}
воид петља ()
{
инт флексибилност;
инт сервопозиција;
флекпоситион = аналогРеад (флекспин);
сервопоситион = мапа (флексибилност, 1018, 1023, 0, 90);
сервопоситион = ограничење (сервопоситион, 0, 90);
серво1.врите (сервопозиција);
Сериал.принт ("сензор:");
Серијски.принт (флексибилан);
Сериал.принт ("серво:");
Сериал.принтлн (сервопозиција);
кашњење (1000);
}Укључите порт порт на који је Ардуино повезан и убаците скицу

Сада посматрамо промене које се дешавају на монитору лука када се наш сензор савије, видимо да је 1023 90 степени, а 1020 и 1019 0, тако да у мом случају мењам број 1018 на скици на 1020, а можете имати другу. Сада је 1020 0 степени, а 1023 90 степени. Након свих промена, пренесите нову прилагођену скицу на Ардуино плочу


Па, то је то! Наш најједноставнији и најважније јефтини сензор за савијање је спреман!
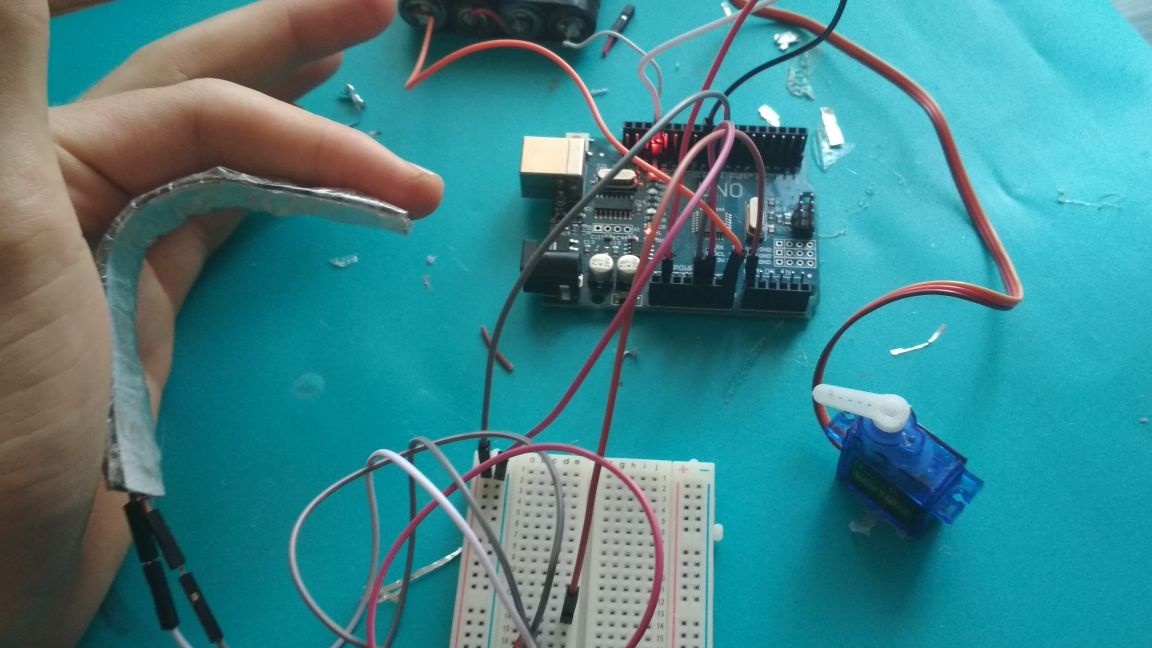
Ако се све изврши правилно, када је сензор савијен, серво погон ће направити окрет за 90 степени, а када се продужи, вратит ће се у првобитни положај. Наравно, тачност овог сензора је инфериорнија од купљеног, али је погодна за пројекте који нису посебно збуњени, а осим тога, ако све обавите пажљиво и фино подесите, испоставит ће се готово као купљени. Надам се да је овај чланак некоме користан.
Хвала свима на пажњи!