

Виброботи су такви роботикоји се крећу услед вибрација. Упркос чињеници да је њихов дизајн прилично једноставан, они на послу нису ништа мање импресивнији од своје технички софистицираније браће. Такав робот користиће чекиње као покретач, то су својеврсне ноге.
Робот описан у чланку може самостално мењати путању кретања и сам по себи заокружити препреке. Као експеримент, аутор је створио два робота на која су инсталирани различити извори енергије и мотори. У принципу не постоје строги стандарди у вези са коришћеним материјалима, главна ствар је да се придржавате дате шеме приликом састављања робота.

Материјали и алати за производњу:
- најлонске кравате величине 3к150мм;
- изолациона трака црне боје;
- 9-волтна батерија (6Ф22);
- ласерски диск (ЦД или ДВД без разлике);
- заштитно кућиште;
- 9-волтни конектор за акумулатор;
- ексцентрично (брисање).

Процес производње робота:
Први корак. Креирајте основу робота
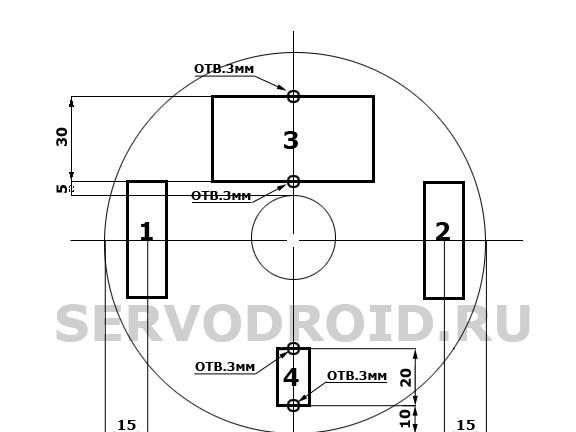
Као основа за робота користиће се обичан ЦД или ДВД диск. Направите рупе у њој јасно према шеми која је представљена на фотографији. Без изузетка, све рупе су бушене бушилицом од 3 мм. Овај пречник је сасвим довољан када се користи за причвршћивање најлонских кравата. Ако се одлучите за другачији начин причвршћивања, рупе се могу избушити до било које друге величине. Предложени цртеж је погодан за било који склоп робота.
Бројеви 1 и 2 означавају места инсталације четкица, батерија је постављена у квадрат са бројем 3, а мотор је постављен у квадрат 4.
Корак други Израђујемо и инсталирамо покрете
Захваљујући погону, робот ће се кретати. Да бисте их направили потребно је узети двије четкице за зубе. Најбоље је да четкице буду исте по висини и облику четкице. Ако је облик различит, може се исправити шкарама.
Сада су чекиње потребне за подешавање правца. За то се узима љепљива трака и чекиње су омотане на исти начин као што је назначено на фотографији. У том положају четкицу треба држати око сат времена, тако да четкице памте овај положај. На фотографији, сива стрелица показује смер нагињања чекиња.

Након што сте подесили жељени облик, део четкице морате да одрежете четкицом са четкице за зубе. Затим морате да узмете пиштољ за лепљење и инсталирате чекиње на диск на одређеним местима. Сви радови се морају извести брзо и тачно, јер се вруће лепило брзо хлади и стврдне.Морате покушати инсталирати четке тако да стоје паралелно једна с другом.
Чекиње четкица би требале бити окренуте назад, другим речима, према батерији на 9 волти. Током рада, робот ће се кретати у правцу чекиња, односно место батерије налазиће се на задњем делу робота.

1 - диск, 2 - љепило за топљење, 3 - рупе за уградњу мотора, 4 - рупе за постављање батерије. Беле стрелице означавају смер чекиња.
Трећи корак Прављење ексцентричног
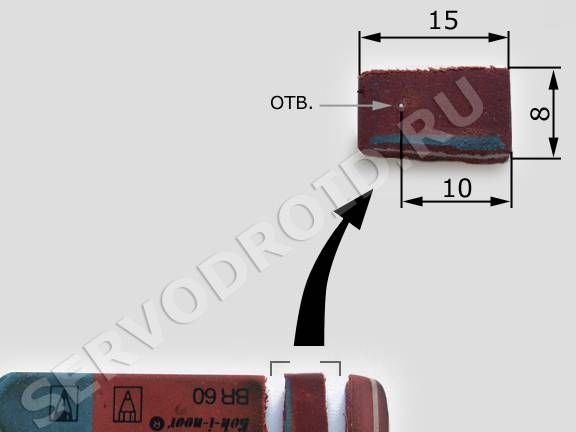
Да би се добила вибрација, на осовину мотора мора се ставити ексцентрични, то јест неуравнотежени објект. Аутор је израдио ексцентрик гумице тако што је одсекао комад одговарајуће величине. На месту направите рупу означену белом стрелицом. Не би требало да буде велико, јер ће ексцентрик склизнути с осовине мотора. Може се направити иглама.
Корак четврти Израда заштитног прекривача.
С обзиром да вибрације ствара ротирајућа гумица за рад робота, препоручљиво је заштитити ово место од разних предмета. Поред тога, таква заштита ће робу дати занимљивији изглед. Заштитни поклопац је направљен од папира, који се састоји од више слојева. Морате направити цилиндар из папира, његова величина зависи од величине мотора. Да би папир добио већу чврстину, може се мазати лепком и, према томе, нанети још неколико слојева. Или можете користити картон за ове сврхе.
Да би се створио цилиндрични облик, мотор је једноставно омотан папиром на врху.




Корак пети Завршна монтажа робота
Мотор се поставља на одређено место, а затим се фиксира најлонским естрихом. Такве естрихе можете купити у продавницама специјализованим за продају грађевинског материјала.
Батерија је такође прецизно причвршћена. Важно је узети у обзир да батерија мора бити јасно центрирана, јер се у супротном може променити путања робота. Узгред, на овај начин је у будућности могуће поставити путању кретања домаће.


Сада између спојнице за спајање и мотора морате инсталирати мали прекидач. Закључно, остаје да спојите цлип-конектор на батерију и можете почети са тестирањем робота. Жице су повезане бојом.
Међутим, када користите Крон батерију, није неопходно инсталирати прекидач, већ можете укључити робота повезивањем конектора.
Па, за другу верзију робота можете једноставно уклонити батерију из уређаја, али наравно пребацивање је више обећавајуће.
То је све, робот је спреман, можете почети са тестирањем. Да бисте постигли жељени резултат, можете покушати да промените поларитет, тако да ће се мотор окретати у супротном смеру, а робот ће се понашати другачије.