

Робот ДИИ ће бити одлична играчка за децу, а уз њу се можете играти и родбина или пријатељи. Суштина робота је следећа. То је кутија са прекидачем. Чим неко кликне прекидач на кутији, почињу се отварати врата из којих излази рука и прекидач враћају у првобитно стање. Упркос спољној једноставности робота, у ствари, све ово делује прилично смешно.
Основа за креирање робота је склоп Ардуино. Постоје и неки механички елементи о којима ће бити речи у даљем тексту. Размотримо детаљније како то може уради сам саставите таквог робота.
Материјали и алати за производњу:
- Ардуино плоча, било која са ПВМ излазима;
- сервомотори, два комада (погодно модел Футаба - С3003, снага таквог мотора је довољна за отварање врата, уређај производи до 3,2 кг / цм снаге);
- батерије;
- прекидач типа СПСТ или СПТТ;
- прекидач за контролу снаге батерије;
- требате дугме да бисте поново покренули Ардуино;
- жице, скакачи и остале ситнице.

Поред тога, додатно ће вам требати мењач (погодан за радио-контролисане аутомобиле), плоча за електрични мотор звана Ардуино штит мотора, РЦ серво мотор. Ове компоненте су потребне како би се кутија померила, попут аутора.
Да бисте смањили ниво буке током рада уређаја, потребни су кондензатор електролитичког типа номиналне вредности 10мФ, 10К отпорник и претварач 74ХЦ04.
Процес производње робота:
Први корак. Како направити кутију
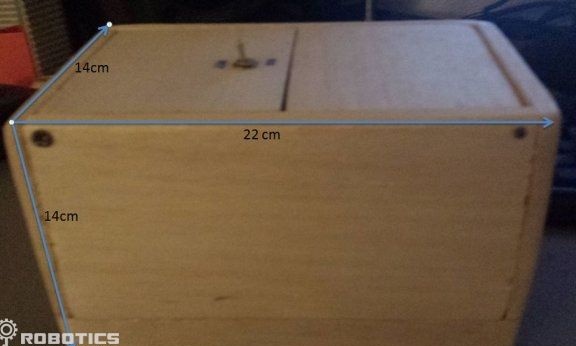
Да бисте створили кутију, односно тело робота, морате да пронађете шперплочу или плуто. Поред тога, за лепљење дрвета вам је потребан снажан лепак. Важно је схватити да што више тежи конструкција, то ће се више потрошити. Што се тиче величине кутије, она је 22цм к 14цм к 14цм.
Корак други Шематски дијаграм е делови
Врх робота укључује главну плочу Ардуино, два серво-склопа и прекидач. Што се тиче круга, који је одговоран за количину буке, може се заменити обичним отпорником.
Серво погони се напајају кроз пети пин Ардуино плоче. Што се тиче сигналних жица, оне су повезане на контакте 9 и 10. Захваљујући овим ПВМ контактима контролира се угао ротације сервомотора. То је угао од 0 до 180 степени.
Црвено дугме је потребно да бисте поново покренули Ардуино.
На дну круга је Ардуино плоча оклопа мотора.На плочи можете видети два канала, А и Б, захваљујући њима по жељи можете повезати два мотора одједном. Главни задатак ове плоче је да помоћу ње можете програмски подесити брзину ротације, смер, прекиде за било који канал мотора. Ако погледате дијаграм, тада се користи канал Б, док контакт 13 одређује правац, контакт 11 је брзина, а контакт 8 користи се за контролу кочница.
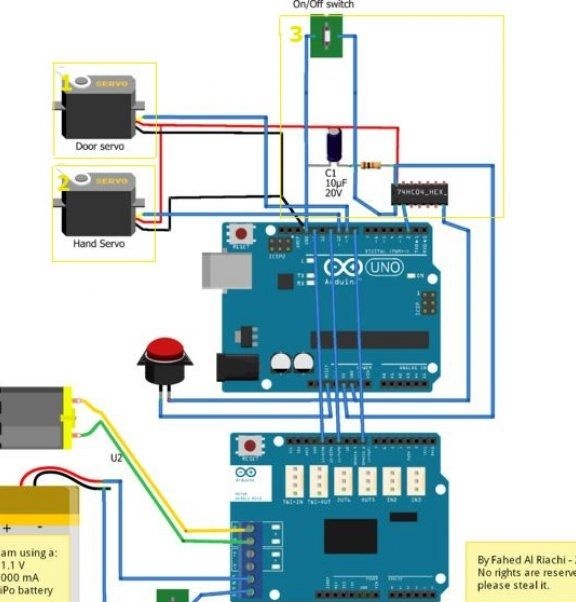
Извор напајања је 11,1 / 1000 мА батерија и повезује се са Ардуино плочом мотора. Ако се неће користити, батерија је директно повезана са главном плочом.
Трећи корак Уградња мотора
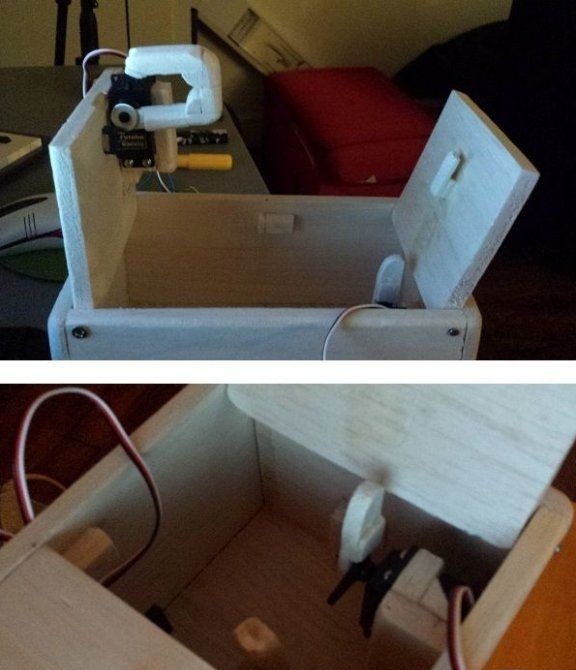
Серво погон и руке су инсталирани експериментално, у пракси морате проверити да ли механика исправно ради. Да бисте проверили радијус одступања мотора, можете користити Ардуино ИДЕ програм.
За израду ручно узетих дрва било које врсте. Главна ствар је да је светлост, јер ће се у противном потрошња енергије повећати. Што се тиче величине руке, она се подешава током уградње, одабиром жељене дужине, постиже се жељени ефекат.
Гурач поклопца и рука постављени су тако да се током рада не дотичу сервомотору.
Корак четврти Повезујемо сервомотор и прелазимо на Ардуино
Помоћу жица и скакача морате повезати све електроничке елементе један према другом према наведеној шеми. Жице морају бити положене тако да не ометају покретне елементе робота.
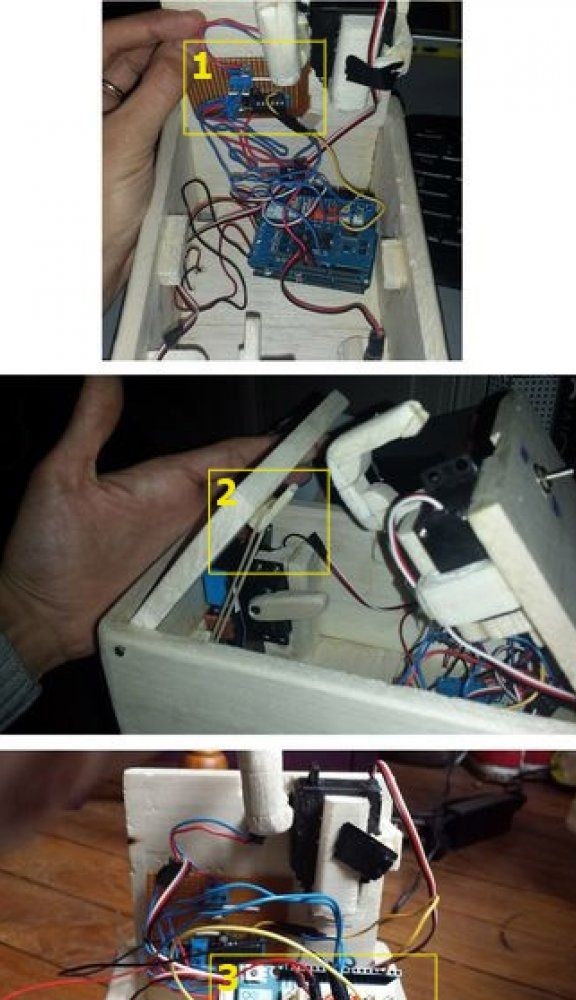
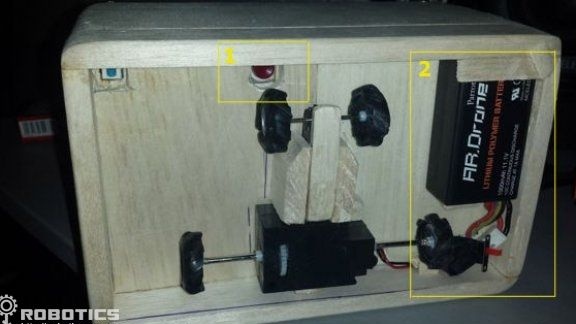
Под бројем 1 можете видети како је повезан и где се налази склопни круг. Број 2 означава такав елемент као еластична трака, потребан је за отварање врата са одређеном напетошћу. Па, број 3 означава оклоп мотора инсталиран на Ардуину.
Корак пети Уградња механичког дела за померање кутије
На дну кутије је батерија, мотор са точковима, мењач, тастер за ресетовање и преклопник за контролу снаге робота. Пре него што причврстите елементе, морате израчунати баланс тежине кутије. Да би робот био стабилан, поред водеће осе уграђена је још једна.
Корак шести Још једна додатна функција
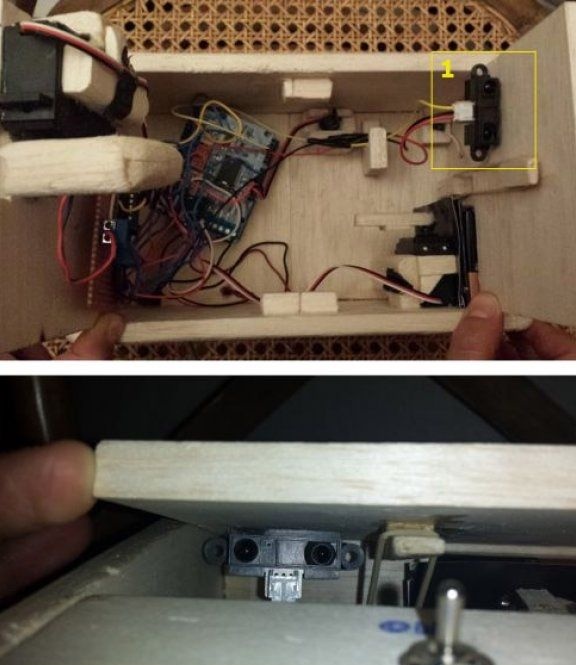
Да би робот одредио правац кретања, може бити опремљен ИЦ сензором. У исто време, када неко покуша да додирне преклопник, кутија ће се померати десно и лево. За ове потребе је погодан сензор ГП2И0А21, који има три жице. Жута мора бити повезана са трећим иглом Ардуино-а, црвена у пин 5, а црна уземљена.
То је све, једноставан и истовремено смешан робот је спреман. Таква играчка донеће радост не само детету, већ ће и изненадити многе одрасле.
Фирмваре: