


Али прво, схватимо шта је то и зашто је потребно. Заправо, његово име нам говори каква је сврха. Формирана је од латинске речи цурвус, што значи закривљена или таласаста. То јест, цурвиметар је мерач раздаљине котача или ваљка. Разликују се две врсте кривуља: мала (картографска), која се обично користи за мерења на мапи, и велика (путна), која се обично користе за мерење дужине закривљених делова већ аутопута. Могу се користити где год је незгодно или немогуће измерити стандардном рулетом, па пројект обећава да ће бити занимљив.
Прва ствар на коју треба водити рачуна приликом прављења цурвиметра је точак или ваљак. Мора бити довољно мали да би тачност инструмента била велика, истовремено мора бити и довољно велика да на вредност очитања не утиче у великој мери храпавост измерене површине. У мом случају, точак је пречника 14 центиметара.

Сада морате одредити материјал и величину конструкције. Користио сам дрво.

На шипкама сам направио ознаку и направио потребне резове и рупе.

Затим сам саставио обрађене делове помоћу малих саморезних шрафова.
Сада се мало одмакнимо од самог мерилника и размислимо о томе како ова ствар чак може одредити удаљеност? Све је прилично једноставно. Само морамо израчунати број обртаја точка и помножити са дужином његовог спољног обима, па је још лакше додати вредност дужине сваки пут када точак направи још један обртај.
Да бисте рачунали сваку револуцију у најједноставнијем случају, можете користити "клизни контакт". Међутим, не препоручујем употребу таквог референтног механизма. Много је боље користити тркачки прекидач или Халл сензор.
Време је да испробате волан. Ја ћу га причврстити дугим вијком. Налазимо место на раму где је обруч точкова што је ближе могуће и обележавамо потезима. Око овог подручја морамо инсталирати трске.

На точак морате инсталирати мали магнет.Уверите се да ће његова снага бити довољна да затвори контакте трске.
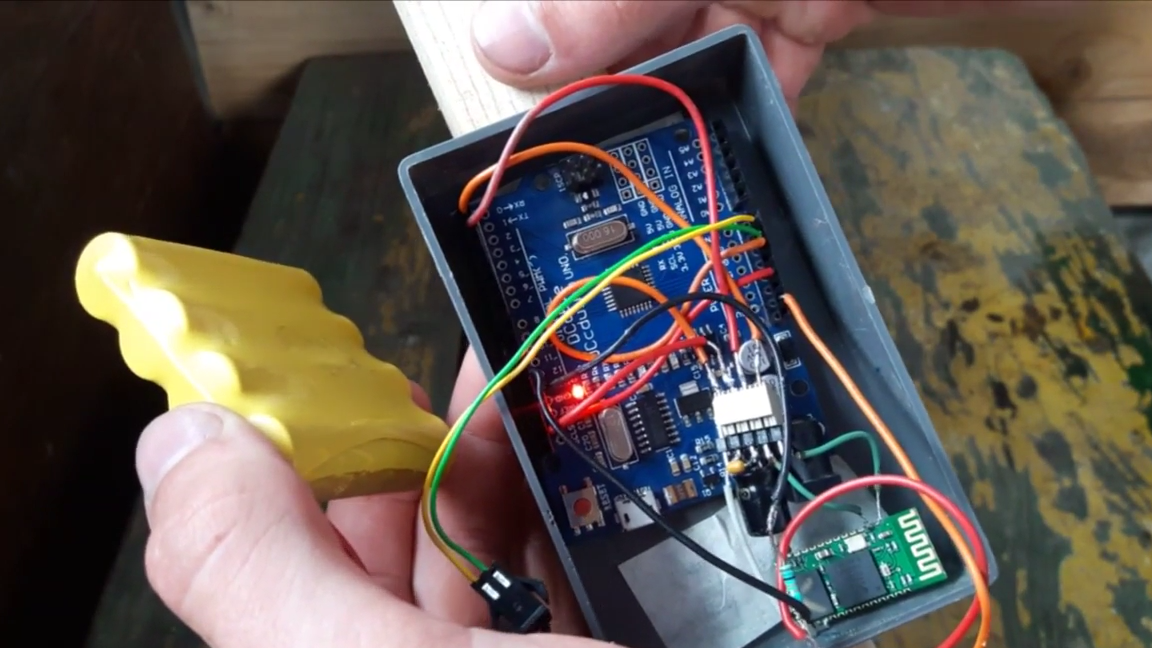
Сада ћемо се бавити „мозговима“ система. У мом случају, ово је накнада Ардуино УНО. Читат ће стање трске и пребацити податке путем Блуетоотх везе, помоћу модула ХЦ-05, на телефон. Успут, штитник трске је повезан са плочом попут обичног дугмета. Мислим да не би требало бити проблема са повезивањем Блуетоотх модула.
Што се самог кода тиче, он је врло једноставан. И покушао сам да то коментаришем како би све било што јасније.
инт герцон = 12; // спојили стезаљку на 12-полни
двострука удаљеност = 0; // створио је двоструку променљиву за чување растојања
воид сетуп () {
Сериал.бегин (9600); // повезао серијску везу
}
воид лооп () {
/ * Следи петља иф. Ако је трска склопка затворена, врши се следеће израчунавање удаљености. Вриједност 0,46472 је већ израчуната дужина једног обртаја точка. Да бисте избегли „додатне“ податке, додајте кашњење од 200 милисекунди и прикажите очитане вредности
* /
иф (дигитално читање (герцон) == ХИГХ)
{
удаљеност = удаљеност + 0,46472;
кашњење (200);
Серијски.принтлн (удаљеност);
}
} 
Ево нашег мерилника и спремни!
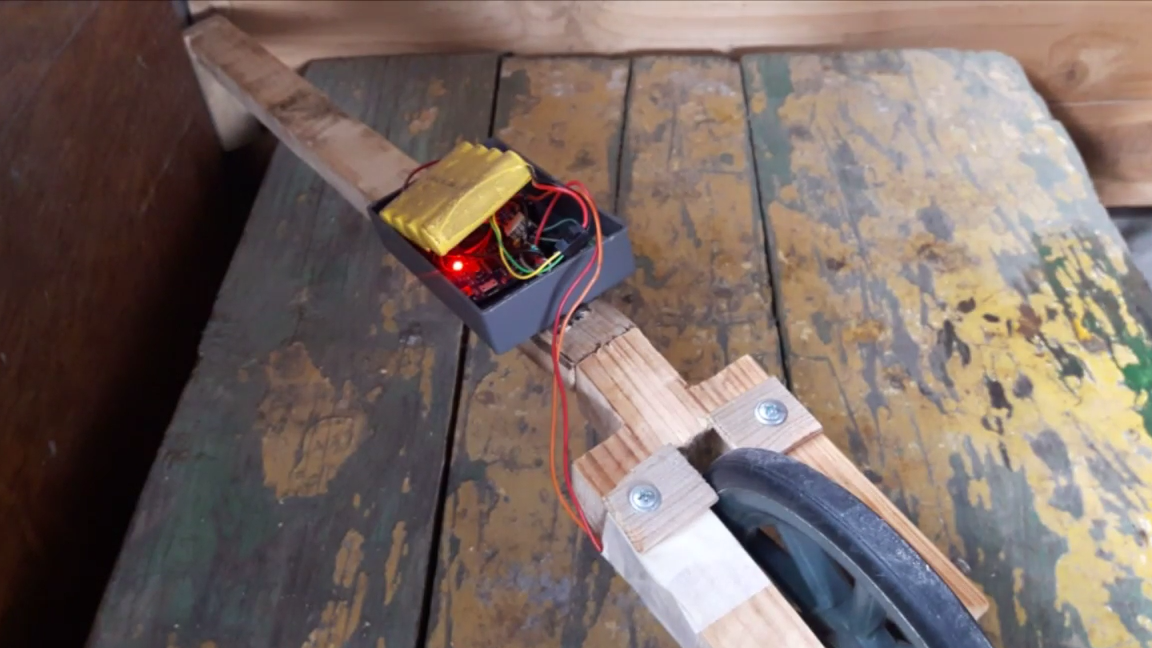
Направимо неколико пробних трка. Све функционише одлично!

Можете погледати видео запис о састављању овог уређаја, можда ћете тамо наћи нешто занимљиво.
[медиа = хттпс: //иоуту.бе/кк_7зтПсЛвс]
Лепо поновите пројекат!