
Посебност робота БИБОТ-1 је та што може да обавља два задатка. Може се кретати иза извора светлости или црном линијом која се може нацртати на папиру. Робот врло флексибилан у подешавањима, односно касније се може прилагодити било којим жељеним условима, односно да би био осетљивији на светлост или мање. Такође је могуће подесити брзину ротације мотора, што ће омогућити робу да боље функционише, посебно када се креће дуж линије.

Уређај и принцип робота:
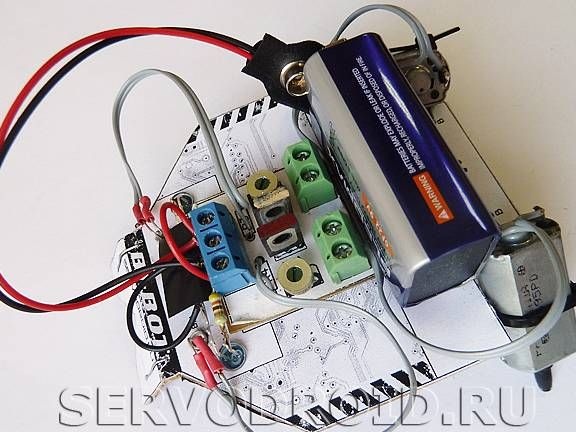
Основа робота је направљена од картона, образац се штампа на штампачу, а затим руши. Што се тиче модула радио компоненти, текстолит је узет као основа, модул је причвршћен на базу робота. Да би каросерија била укочена, у дизајну се користе посебна ребра.
Мотори су инсталирани као и у већини ових домаће, односно под углом. Због тога нема потребе да стављате точкове и мењач. Да би се шахтови не клизали по површини, на њих се постављају заштитници.
Као извор напајања користи се батерија од 9 В типа 6Ф22. Батерија је причвршћена траком и увек је доступна за једноставну замену.
Што се тиче прекидача, онда ауто одлучили су да избегну његово инсталирање. Робот се укључује и искључује манипулирањем копчом која се причвршћује на батерију.
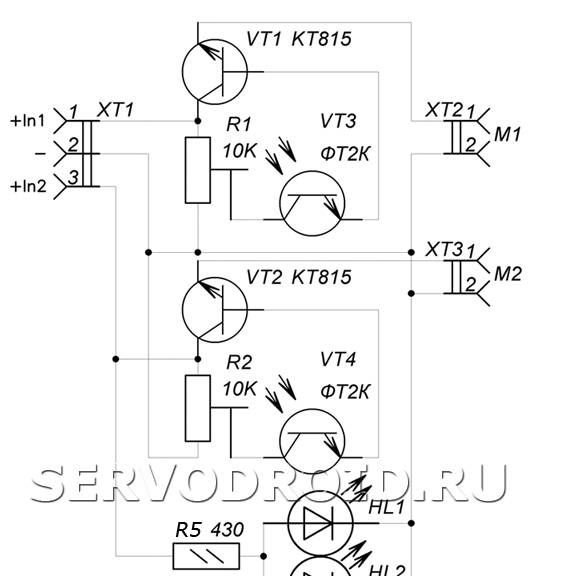
И на крају, подешавање робота. Да би подесио осетљивост робота, систем има два отпорника за подешавање. Када се окрећу, можете подесити осетљивост робота на светлост, а можете подесити и брзину ротације мотора. Што је робот осетљивији на светлост, брже ће се кретати и обрнуто.
Што се тиче принципа рада, све је постављено на дијаграму.
Материјали и алати:
- 9В батерија и спајалица за повезивање;
- два конектора за повезивање мотора (прикључни блок са две секције);
- мотори;
- најлонски естрих;
- заштитник (гумени ваљак);
- два фототрансистатора;
- две инфрацрвене ЛЕД;
- носач од спењача;
- троструки прикључни блок за прикључак на напајање;
- подешавање отпорника.

Процес производње:
Први корак. ПЦБ десигн
Накнада се ствара методом ЛУТ. Пре рада, површина стаклопластике се мора темељно очистити, а затим опрати и темељно осушити. Након производње, проводљиви трагови морају се проверити мултиметром ради кратког споја.
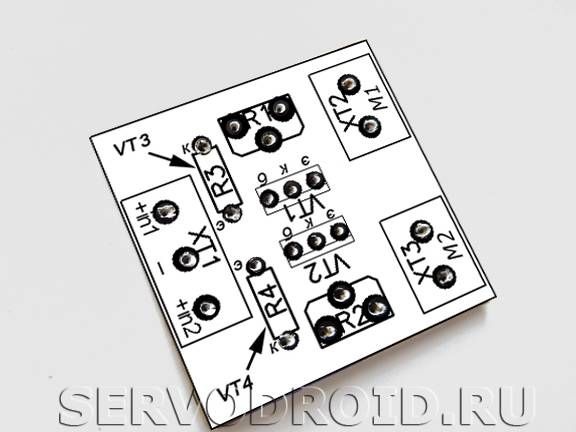
Корак други Инсталација електронски елементи
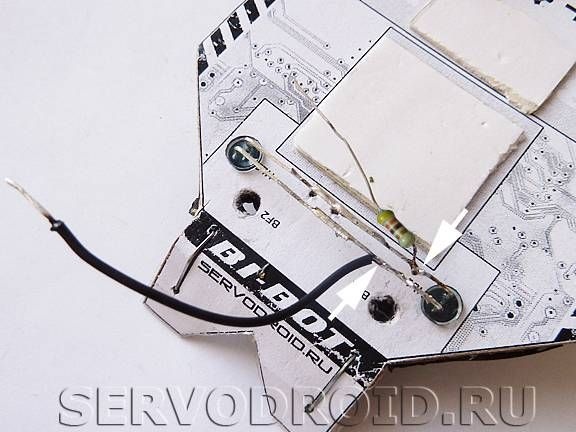
Затим требате узети цртеж одштампан на папиру и залепити га на креирану плочу. У овом случају рупе на папиру и на ПЦБ-у морају се тачно подударати. Затим се радио компоненте инсталирају као што је приказано на дијаграму. У процесу рада, уградња отпорника Р3, Р4 треба да инсталира фототрансисторе ВТ3, ВТ4.
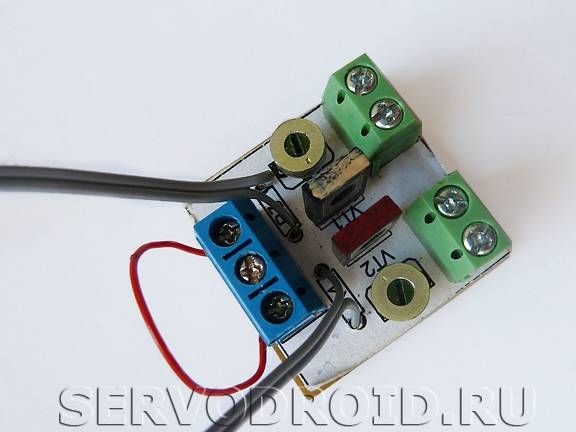
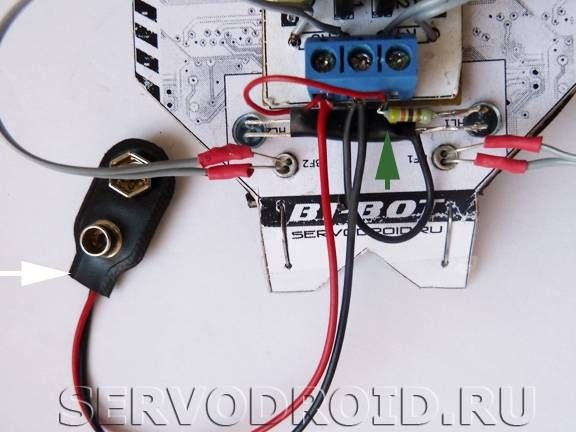
Екстремни одељци троканалног прикључног блока КСТ1 морају бити повезани причврсном жицом. Тачке спајања контаката морају бити добро изоловане, најбоље је да се за то користе топлотне стезне цеви.
Трећи корак Како створити случај
Цртеж тела мора бити одштампан на обичном листу папира А4. Затим морате узети комад валовитог картона и на њега налепити цртеж, након чега се кућиште мора резати по ободу.
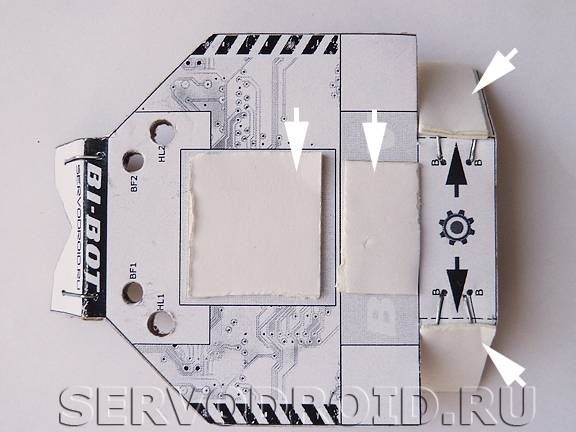
Тамо где је пиктограм „шкаре“ смештен смелим линијама, треба направити резове. Након тога, дуж црних испрекиданих линија, морате савити картон као на фотографији и ставити црне стрелице.





Предњи и задњи део кућишта до одређеног положаја помоћу спењача, морате инсталирати носаче. Мјеста њихове уградње означена су црним линијама с круговима. Потребне су спајалице како би оквир био чвршћи. Након постављања носача, заморно се савијају дуж линија савијања.
На мјестима која су означена БФ1, БФ2, морате направити рупе за уградњу фототрансистатора. На местима ХЛ1, ХЛ2, морате направити рупе такве величине да одговарају пречнику кућишта инфрацрвених ЛЕД.
На места означена као Мод "," БАТ 9В "и" МОТОР 1 "," МОТОР 2 "налепите траке двостране траке.
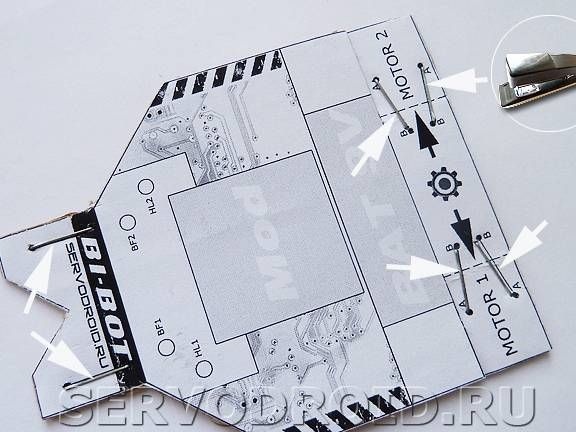
Корак четврти Уградња мотора
Мотори су монтирани у положају помоћу најлонских кравата. Да штитници не би исклизнули, морају се носити са штитницима. Израђене су од гумених трака, које се налазе у хелијумским шипкама оловака. У истој фази лемите жице за моторе.


Корак пети Инсталација инфрацрвених ЛЕД
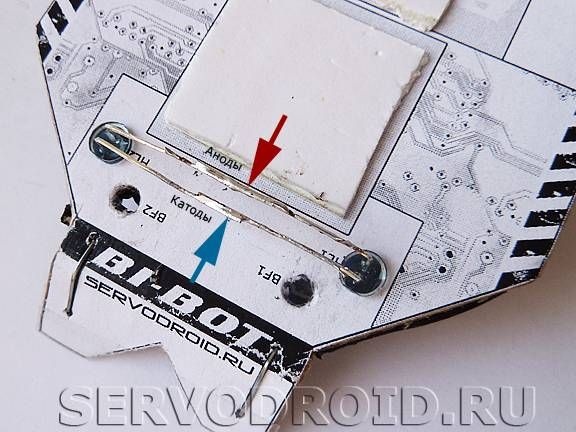
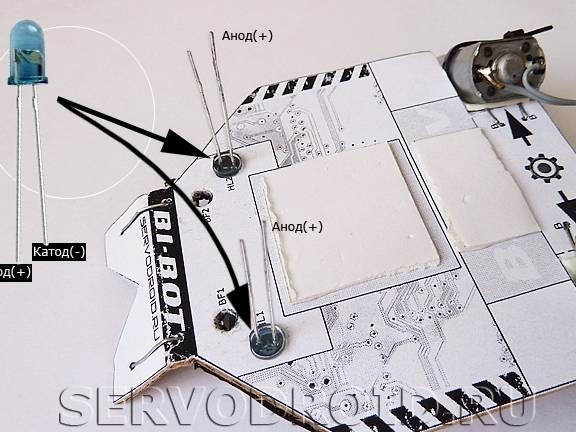
Када инсталирате инфрацрвене ЛЕД-ове, важно је не збунити њихове закључке, јер за увезене елементе дуг контакт је анода, што је плус. ЛЕД се инсталирају на позицијама ХЛ1, ХЛ2 као што је приказано на фотографији. Налази су савијени тако да се диоде могу повезати паралелно.
Отпор од 430 охма мора бити лемљен на позитиван контакт ЛЕД-ова, а црна жица на негативни контакт.
Други крај црне жице мора бити повезан са средишњим иглом тространог прикључног блока. Што се тиче излаза отпорника, он је повезан са прикључком терминалног блока.
Корак шести Завршна фаза израде
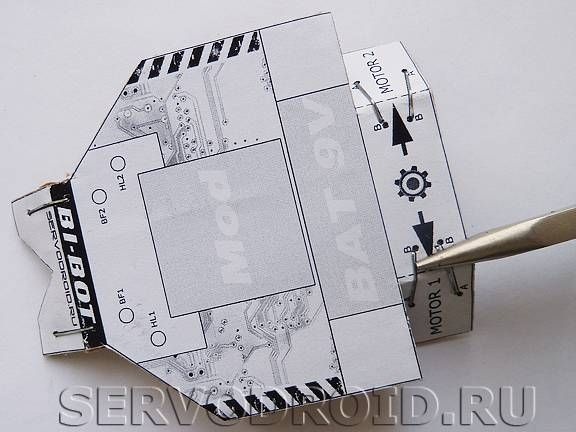
Да би се робот кретао дуж линије, фототрансистори се постављају на место БФ1, БФ2 као на фотографији.
Транзистори за кретање иза извора светлости постављени су са задње стране.
Закључно, мотори су повезани и батерија је стављена.


То је све, робот је спреман. Сада га можете покушати укључити и конфигурирати на жељене услове.