

Занимљиво и нимало компликовано роботкоји се креће иза предмета одређене боје.
За одређивање положаја објекта користи се камера за паметне телефоне постављена на шасију робота. Можете користити готов конструктор, о којем сам већ писао овде. Ево списка шта је аутору било потребно. Изузев смартфона, цена овог робота била је 60 долара
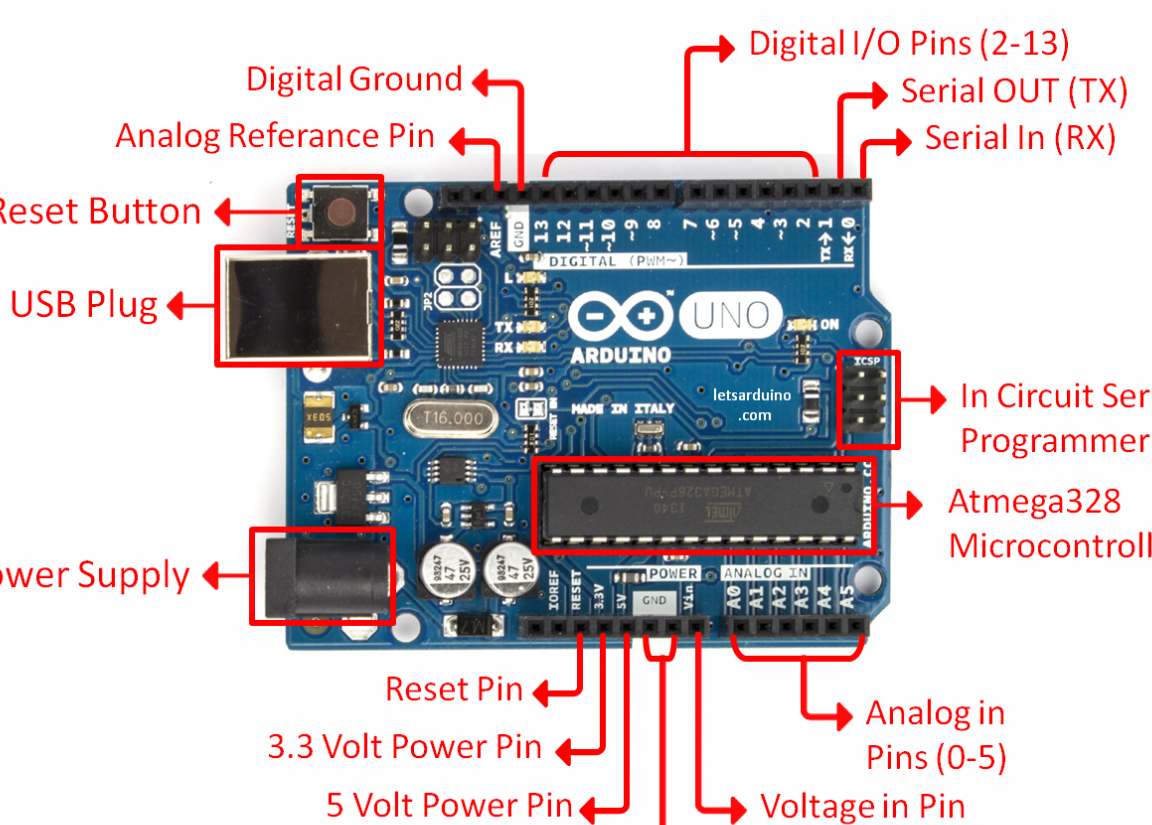
- Ардуино Уно
- Смартпхоне са Андроид ОС-ом
- Шасија робота
- каблови за повезивање
- Х мост за истосмјерне моторе (аутор користио пололу ТБ6612ФНГ)
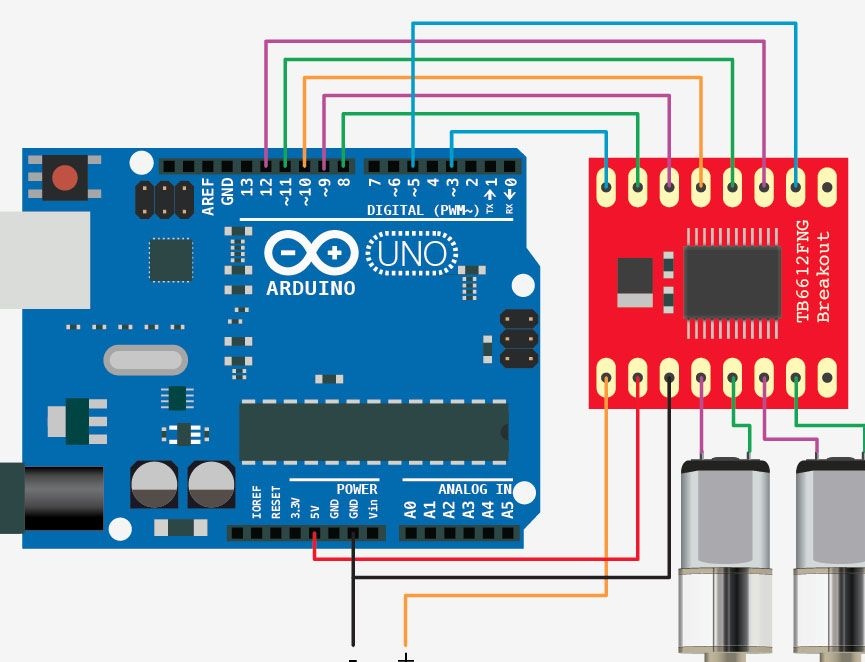
На слици се види како се ТБ6612ФНГ и Ардуино Уно повезују
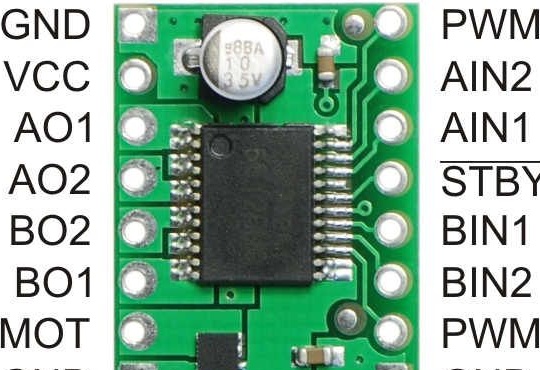
Закључци возача и шта су одговорни за:
1) ГНД - Повежите га са ГНД иглицама на Ардуино-у
2) ВЦЦ - Напајање напона логике покретача. Прикључите га на 5В пин на Ардуино-у.
3) А01 - излазни контакт, који је повезан са позитивним прикључком мотора А.
4) А02 - излазни контакт, који је повезан са негативним полом мотора А
5) Б02 - излазни контакт, који је повезан са негативним полом мотора Б.
6) Б01 - излазни контакт који је повезан са позитивним прикључком мотора Б
7) ВМОТ - Излазни напон мотора. Прикључите га на позитивни пол батерије. (За напајање мотора)
8) ГНД - Прикључите га на негативни терминал батерије.
9) ГНД - Прикључите га на ГНД пин на Ардуино-у.
10) ПВМБ-ПВМ пин управљачког програма мотора како бисте прилагодили брзину мотора Б. Повежите га с било којим ПВМ иглицама на Ардуино и одредите вредност брзине мотора од 0-255.
11 и 12) и БИН2 БИН1 - улазни контакти покретачког мотора за мотор Б, који одређују смјер ротације мотора Б. Повежите га с било која два Ардуино дигитална контакта.
13) СТБИ - Повежите га на било који дигитални излаз. Када се инсталира на високом нивоу, укључује драјвер
14 и 15) АИН1 и АИН2 - улазни контакти покретачког мотора за мотор, који указују на смјер ротације мотора А. Повежите га на било која два Ардуино дигитална пина.
16) ПВМА - ПВМ излаз покретача мотора за подешавање брзине мотора А. Спојите га на било који ПВМ игле на Ардуино и одредите вредност брзине мотора од 0-255.
Блуетоотх модул ХЦ-06
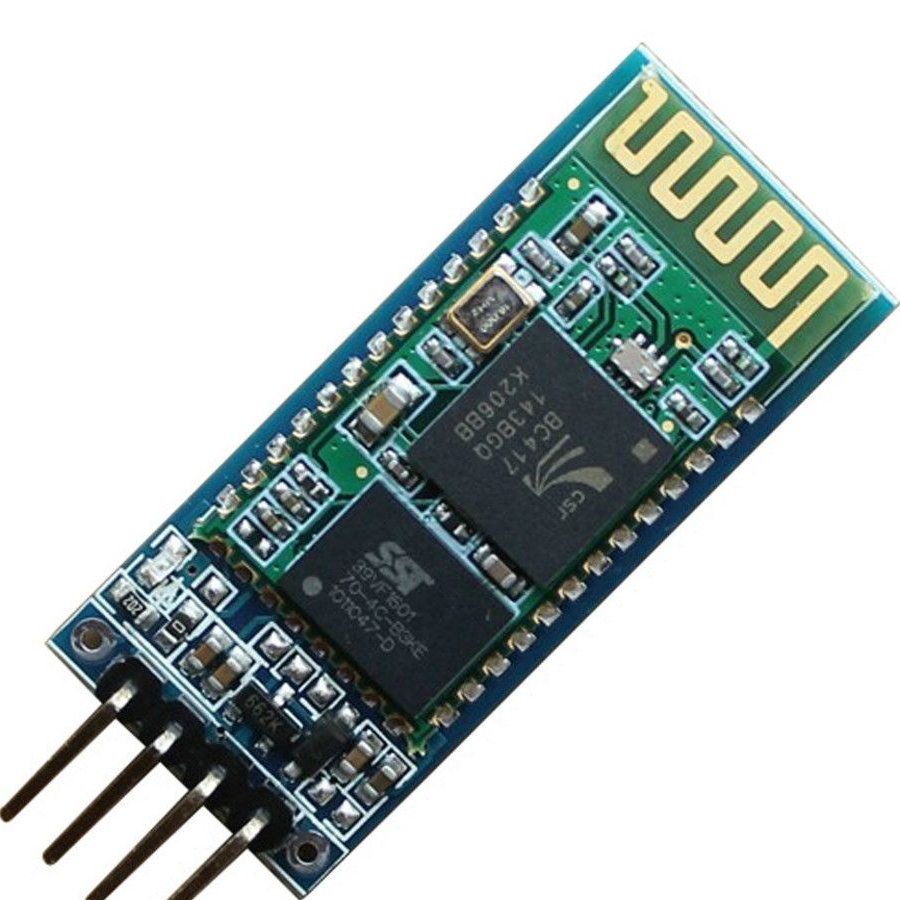
Алиекпресс кошта око 6 долара
Како то све ради?
Овај пројекат користи Андроид паметни телефон са посебном апликацијом која обрађује информације са камере да би утврдила где је црвени објект, израчунава његове координате

битмап = Битмап.цреатеБитмап (мРгба.цолс (), мРгба.ровс (), Битмап.Цонфиг.АРГБ_8888); Утилс.матТоБитмап (мРгба, битмап);
инт к = 0;
инт и = 0;
инт алл_к = 0;
инт алл_и = 0;
док је (к <176) {
док је (и <144) {
инт пикел = битмап.гетПикел (к, и);
инт редВалуе = Цолор.ред (пиксела);
инт блуеВалуе = Цолор.блуе (пиксела);
инт греенВалуе = Цолор.греен (пиксела);
иф (редВалуе> 200 && блуеВалуе <70 && греенВалуе <70) {
поени ++;
алл_к = алл_к + к;
алл_и = алл_и + и;
}
и ++;
}
к ++;
и = 0;
}
и = 0;
к = 0;
к_центер = алл_к / поени;
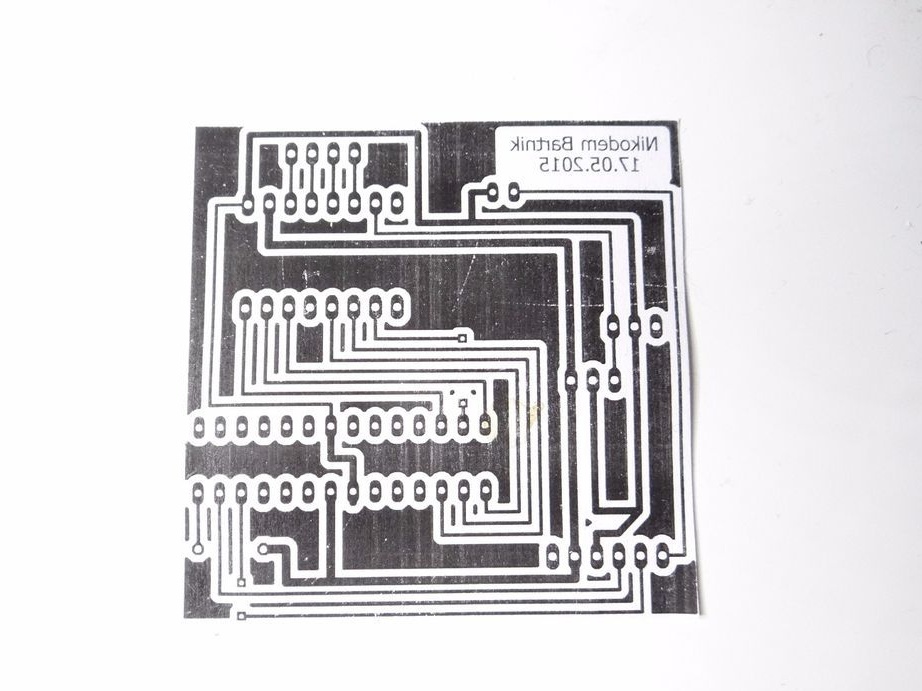
и_центер = алл_и / поени;У архиви, дијаграм везе и штампану плочу за робота, за оне који не желе да купују Ардуино УНО
Шта је потребно за монтажу:
- Све што је горе поменуто, атмега 8, 128 или 328
- ЛЕД, без обзира на боју
- 5В линеарни стабилизатор (за верзију без Ардуино-а)
- Пин конектори М и Ф
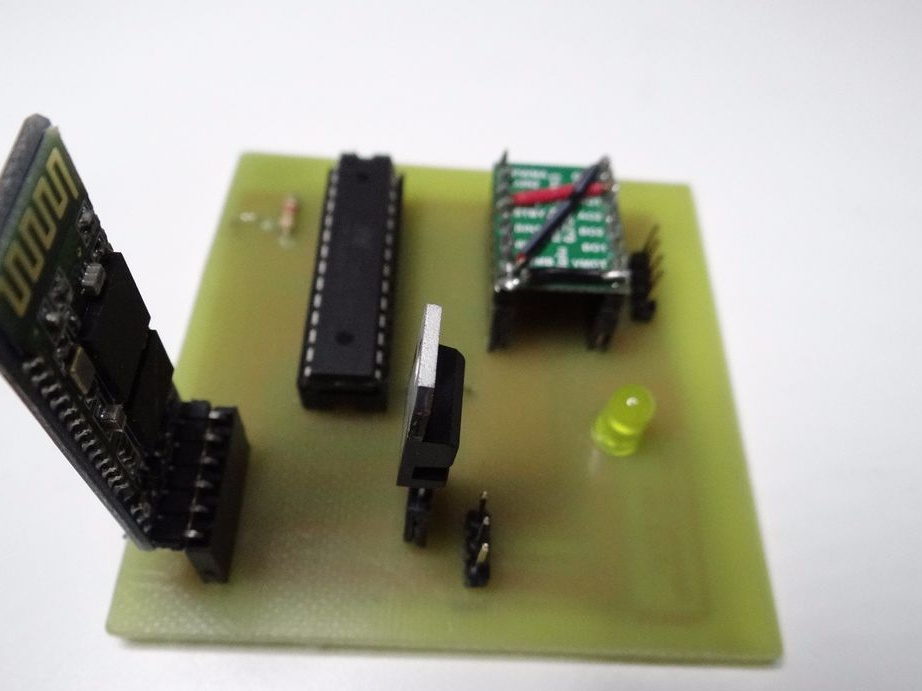
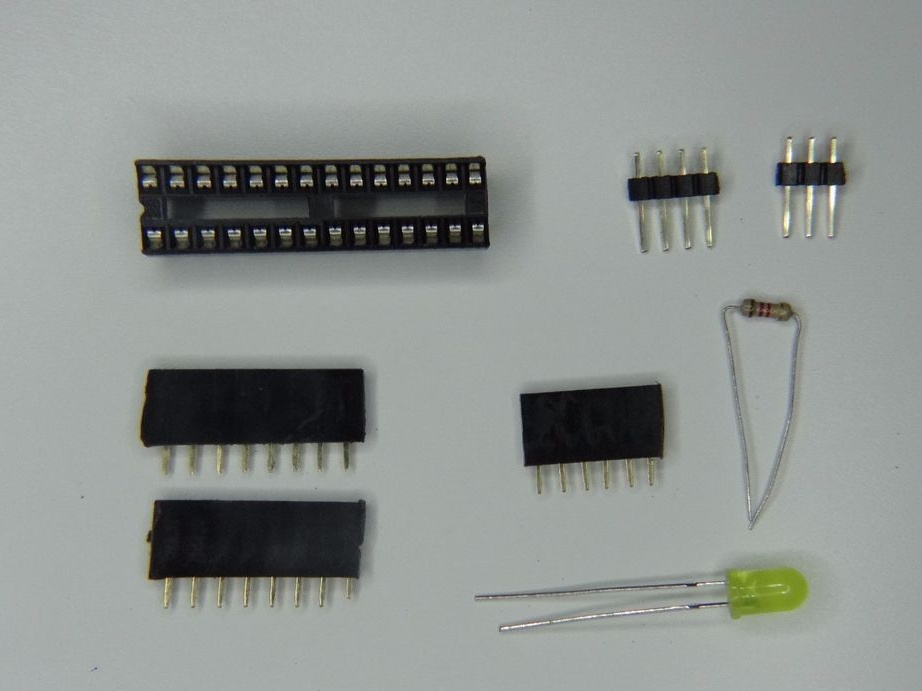
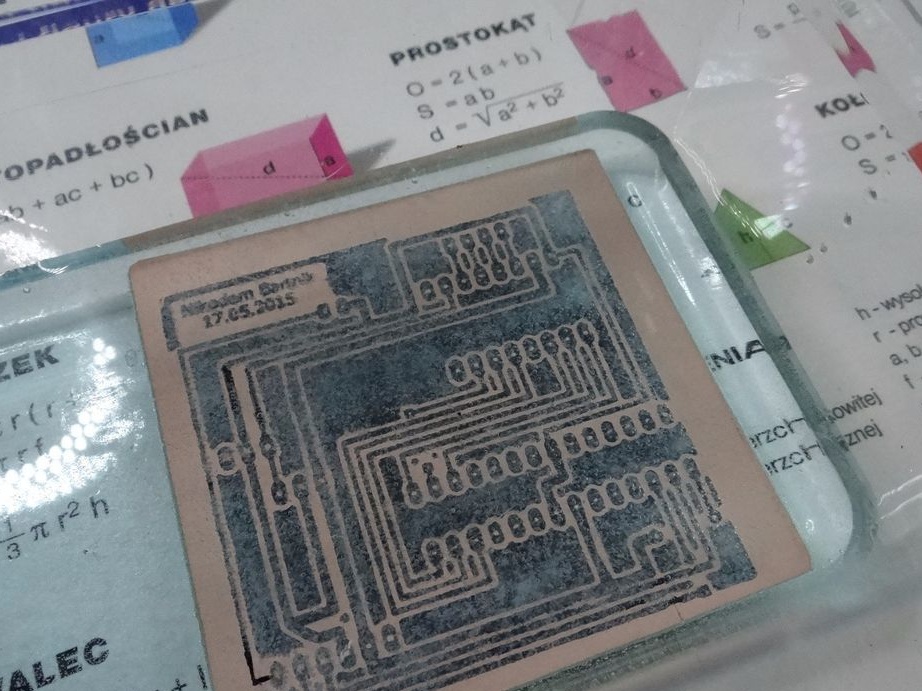
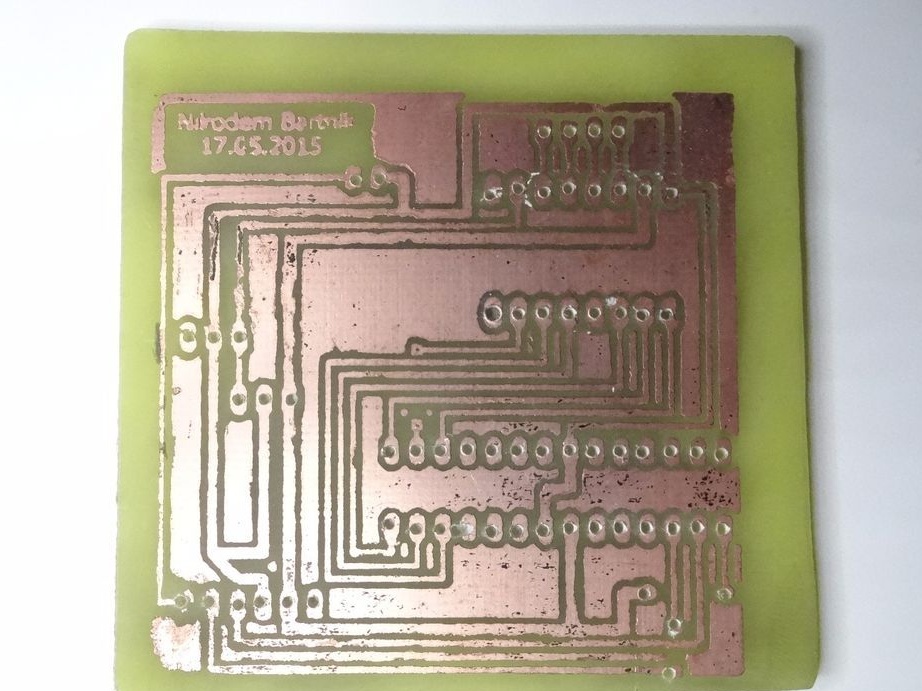
- Изрезбарени и избушени ПЦБ (за верзију без Ардуино-а)
- Бушилица, лемљење.
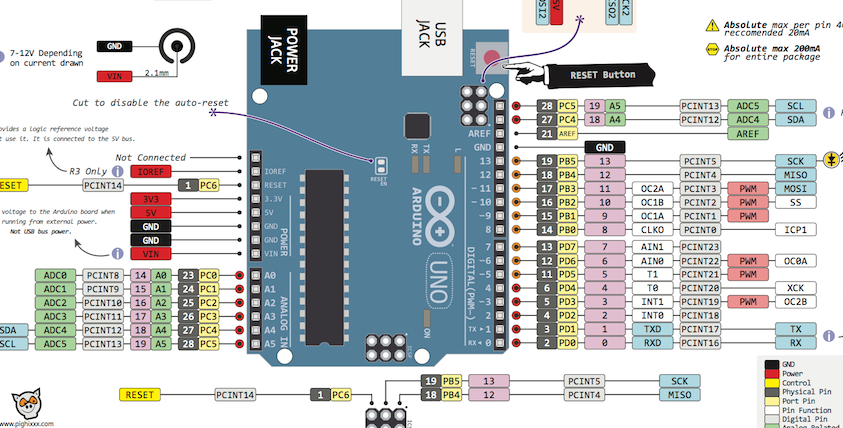
- Ардуино Уно. За оне који не знају који су закључци Ардуино Уно потребни, у опису приложене датотеке.
Програм за Ардуино
Програм за Ардуино је веома једноставан. Архивски код овог програма.
Програм за телефон
У овој архиви је инсталиран програм за телефон, попут обичне апликације, и изворни код овог програма: Увезите га у Андроид студио, прикупите апк датотеку и инсталирајте је на ваш паметни телефон.
Овај програм користи Блуетоотх само за слање података. Опис библиотеке (опенЦВ) можете наћи на Интернету. Аутор је урадио штампану плочу за атмега 328. Запамтите ово ако нећете користити плочу, али ће вам дистрибуирати свој печат: