
Овај робот контролише блуетоотх паметним телефоном. Акцелерометар смартфона мери угао телефона лево / десно, горе / доле, користи ове податке за израчунавање брзина усмерених мотора, подаци се преко Блуетоотх-а преносе на Ардуино
Шта вам треба за изградњу робота.
Ардуино уно, ХЦ-06 Блуетоотх модул, два мотора с 12 В / 12 12 степена преноса, Х-мост Л298Н Дуал Х Бридге Цонтроллер
12 до 1.3 Батерија од оловне киселине. Сваки мотор троши 0,4А, плус потрошња логике возача. Ардуино жице, обичне 9В батерије и конектор за повезивање батерије на Ардуино. Електричне жице за повезивање покретача електромотора. Усб кабл. Телефон са Андроидом верзије 4 и новијим. 4 окретна 50 мм гумена фелга из Сцревфик-а или Тоолстатион-а, два универзална чворишта Линкмотион ХУБ-02.










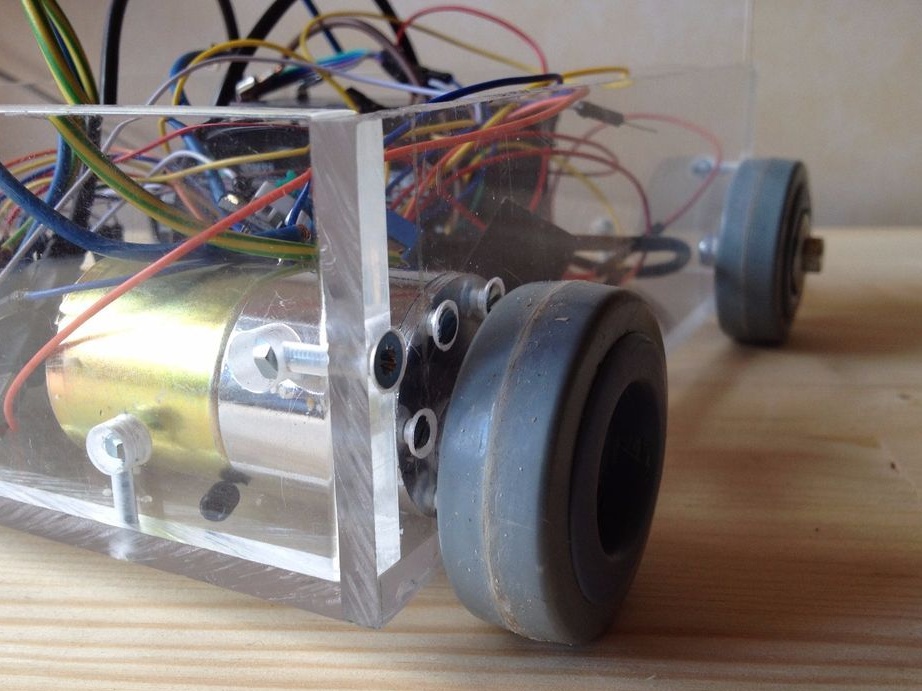
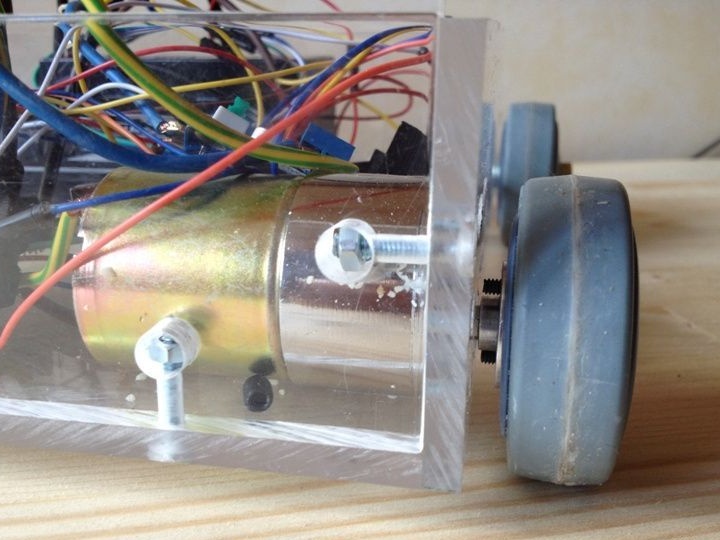
Футрола је састављена од пластике дужине 22 цм и ширине 17 цм. Два мотора морају бити повезана на осовину и причвршћена навојним осовином.
Предњи точкови
Гума се вади из ваљака и у њима се извртају две рупе у складу са отворима на главчинама. Главчине су фиксиране на осовинама које пролазе кроз кућиште с навојним затичима. Након тога, ваљци се фиксирају на хубима, а на њих се поставља гума.
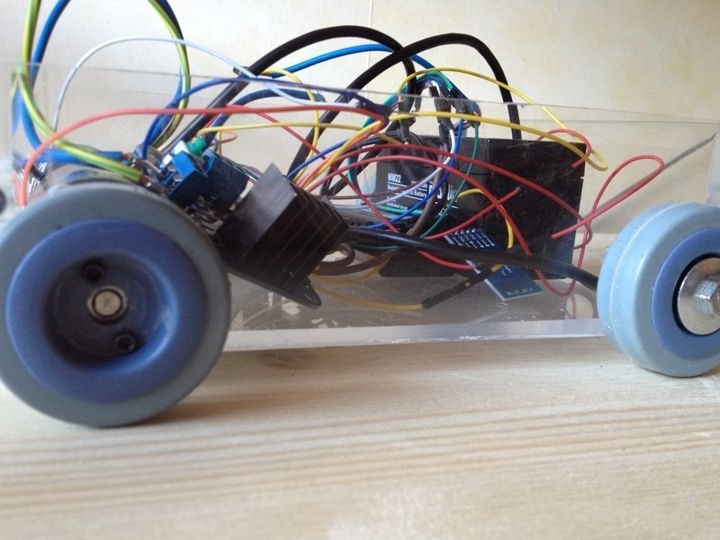
Задњи точкови
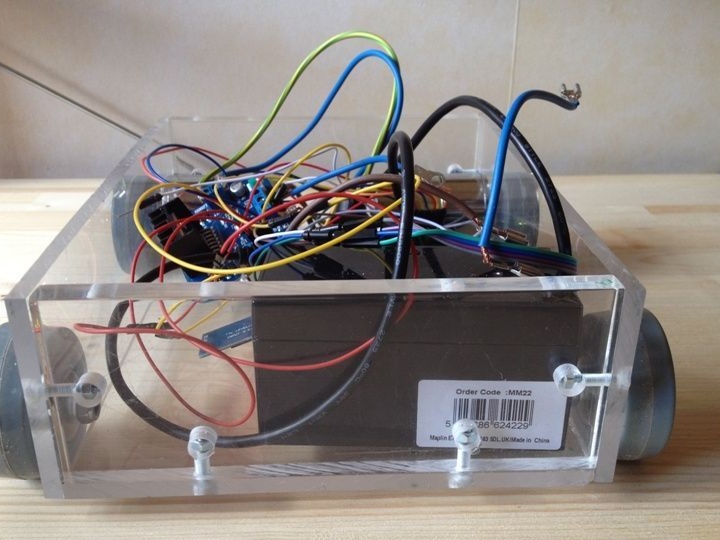
Задњи точкови су једноставно одврнути са шарке и осигурани кроз рупе избушене у кућишту.
Електричне везе.
Биће проблема са учитавањем програмског кода у Ардуину. То је због чињенице да су Блуетоотх модул, његови РКС \ ТКС контакти повезани на Ардуино пинове 1 и 2, који се такође користе за пренос података путем УСБ-а. Потребно је променити контакте 1 и 2 у 11 и 12 у повезаној библиотеци, који ће се користити за пренос података.
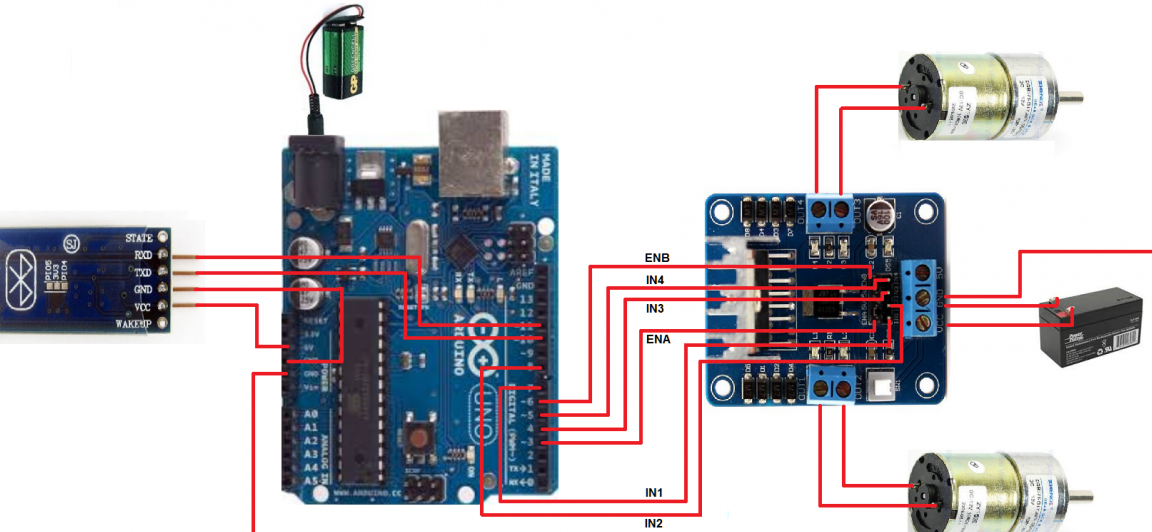
Возачу мотора није потребно одвојено напајање за логику. 12В је довољно за напајање логике возача и самог мотора. Минус батерије треба да буде повезан и са Ардуино и са возачем мотора. ЕЦА / 5В и ЕНБ / 5В контакти возача мотора могу се прескочити. Мора се уклонити пре повезивања са Ардуином. Ништа не би требало бити повезано са два 5В пина.
Андроид код.
Приложена датотека мора бити распакована и увезена у Андроид Студио, спаковати је у апк и инсталирати на телефон.
Кључне датотеке:
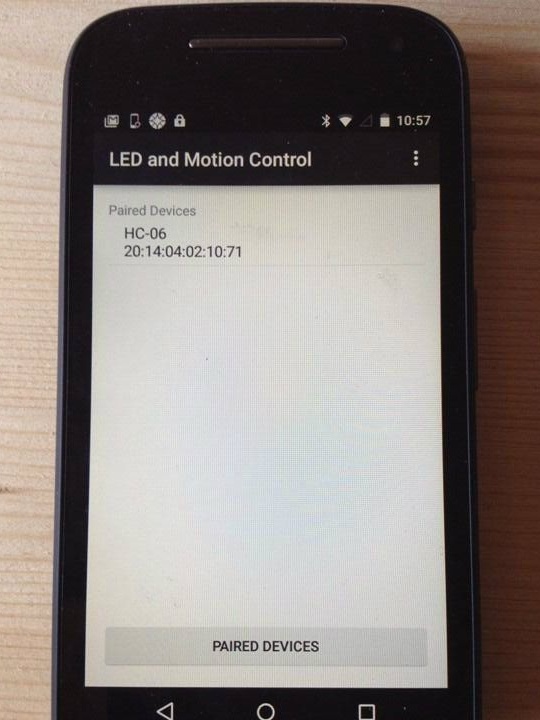
Активност упарених уређаја:
девицеЛист.јава
Ацтивити_девице_лист.кмл
Активност контроле ЛЕД и покрета:
ледЦонтрол.јава
ацтивити_лед_цонтрол.кмл
Манифест:
АндроидМанифест.кмл
Активност упарених уређаја приказује доступне Блуетоотх уређаје. Чим су уређаји повезани, контрола се преноси на ЛЕД и активност контроле кретања.
Тастери за укључивање / искључивање шаљу Ардуино поруку „укључено“ или „искључено“, укључивањем или искључивањем уграђене ЛЕД. Акцелерометар телефона, који преноси к / и вредности из сензора, сваки пут када се те вредности мењају, контролише кретање. На основу тога Ардуино израчунава брзину и смјер ротације мотора у распону од 0 до 255. Те Ардуино вредности преноси у облику 'Л-255:' или 'Р100' итд. На основу тога Ардуино шаље команде за брзину ротације левог мотора ЕНА, десне у ЕНБ и мења смер ротације мењајући поларитет у ИН1, ИН2 за леви, Н3 и Н4 за десни мотор.